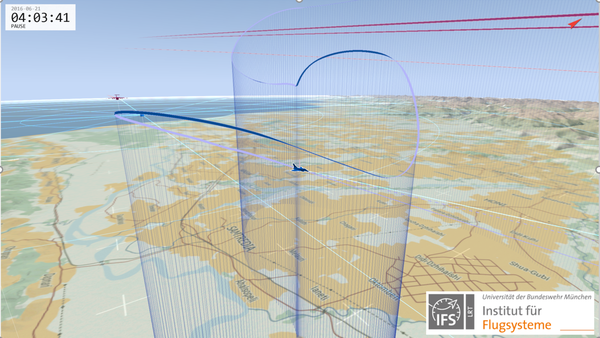
CASIMUS In den CASIMUS Projekten untersucht die Professur für Luftfahrttechnik zusammen mit der Professur für Flugmechanik und Flugführung innovative Missionsführungsansätze bei sogenannten MUM-T Hubschrauber-Missionen.
CARGOPACK Entwicklung eines skalierbaren, nachrüstbaren Modul für Cargo VTOLs , welches automatisiert einen sicheren und kostengünstigen Lastentransport ermöglicht
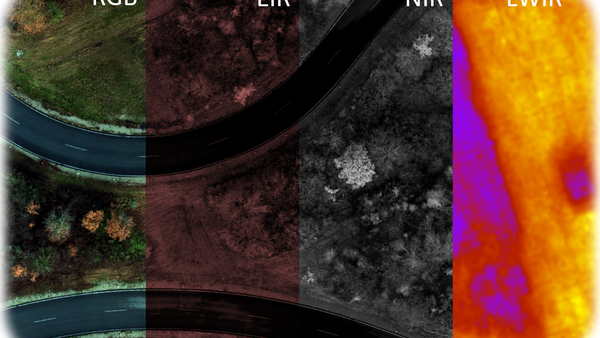
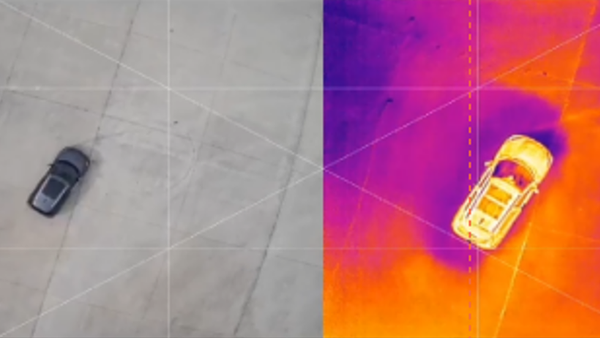
Koko II Kamerabasierte Wolkenerkennung und -vermessung zur Integration von unbemannten Luftfahrzeugen in den zivilen Luftraum.
MOREALIS Notlandefeldauswahl und Hinderniserkennung in einem integrierten Notfallassistenzsystem für UL
VALID Steigerung der Repräsentativität von CGF (Computer Generated Forces)-Simulationen in Ausbildungssimulatoren für den Luftkampf