
Sensoreinsatzautomatisierung
Automatisierung des insatzes von Aufklärungssensoren
In den CASIMUS Projekten untersucht die Professur für Luftfahrttechnik zusammen mit der Professur für Flugmechanik und Flugführung innovative Missionsführungsansätze bei sogenannten MUM-T Hubschrauber-Missionen. Dabei werden mehrere unbemannte Luftfahrzeuge durch die Besatzung eines bemannten Hubschraubers für Aufklärungszwecke von Flugrouten und Missionsgebieten eingesetzt. Das heißt im Hubschrauber-Cockpit muss der Einsatz der UAVs geplant, die Aufklärungssensorik eingesetzt und deren Ergebnisse im taktischen Kontext interpretiert werden.
Vorteil eines solche MUM-T Ansatzes ist der unmittelbare, kurzfristige Zugriff auf die Aufklärungsplattformen. Um allerdings eine solchen Multi-UAV-Einsatz zu ermöglichen, sind neue Methoden der Mensch-Maschine-Interaktion, der Missionsplanung sowie der Cockpitassistenz zu konzipieren und zu untersuchen.
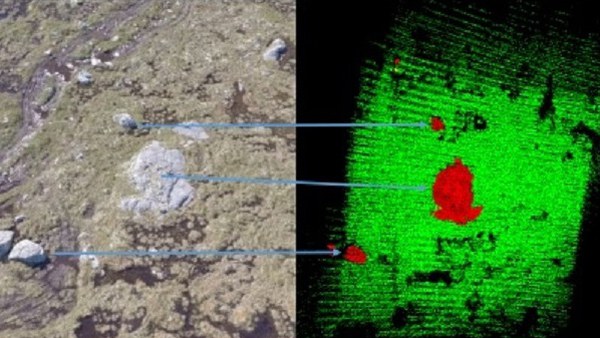
Forschungsgegenstand der Professur in CASIMUS I sind Automatisierungsansätze zur Sensordatenauswertung als Unterstüzung für den Kommandanten des bemannten Hubschraubers. Von besonderem Interesse sind das Konzept variabler "Levels of Automation". Ebenso wird der kooperative Einsatz von mehreren, sensortragenden UAVs sowie Datenfusionsmechanismen zur Alternativenbewertung bei der Landezonenauswahl konzipiert und analysiert.
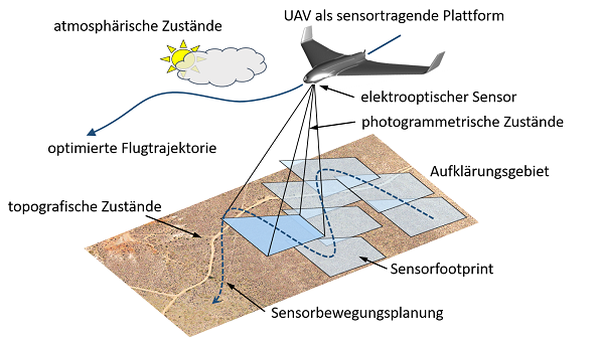
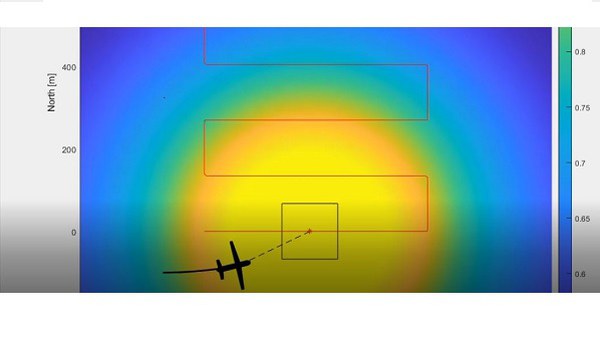
In CASIMUS II werden die Untersuchungen von CASIMUS I fortgesetzt. Von besonderem Interesse für unsere Professur ist dabei die Optimierung der Flugtrajektorien der unbemannten Plattformen (UAVs), um unter Abwägung unterschiedlicher Randbedingungen ein optimiertes Aufklärungsergebnis zu erzielen. Hierfür werden verschiedene Optimierungsmethoden aus dem Bereich der Optimalsteuerung zur UAV-Flugbahnoptimierung untersucht.
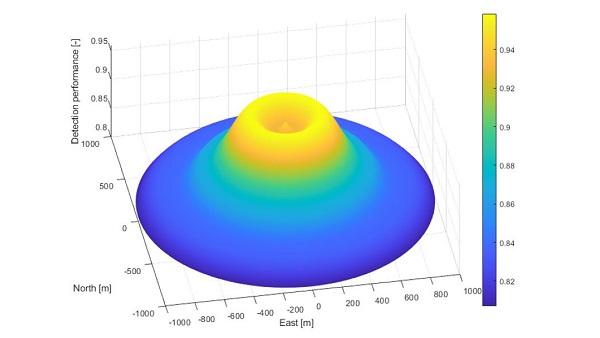
Unser Ziel in CASIMUS II ist es, eine automatisierte und sensorbestimmte Trajektorienoptimierung für das UAV, einschließlich einer koordinierten Sensorführung, zu erreichen. Dadurch soll die Detektionsleistung der luftgestützten Aufklärung gesteigert und gleichzeitig der UAV-Operateur von der navigatorischen Detailplanung entlastet werden.
Dieses Projekt leistet Beiträge zu folgenden Forschungsthemen des Instituts:
| Laufzeit | 2012 - 2022 |
| Projektpartner | keine |