Militärische Szenarien beinhalten vermehrt Konflikte in urbanen Umgebungen. Diese Umgebung birgt jedoch spezifische Gefahren für Soldaten, da dichte Bebauung und große Menschenansammlungen Schutz für irreguläre Kräfte bieten. Eine Möglichkeit in Zukunft diesen Gefahren zu begegnen, soll im MEDUSA-Projekt der EDA (European Defence Agency), an welchem auch das Institut für Flugsysteme der UniBw München beteiligt ist, aufgezeigt werden.
Die Professur für Luftfahrttechnik trägt hierbei mit einer fliegenden Sensorplattform (airborne sensor plattform) als peripherer Sensorknoten zum MEDUSA-Projekt bei. Einerseits sollen Luft- und Entfernungsbilder ins Netzwerk eingespeist werden. Andererseits sollen die Sensoren (EO-Kameras + LIDAR) ziel-, situations- und plattformoptimiert eingesetzt werden. Forschungsschwerpunkte liegen hierbei auf einem intelligenten Sensordaten-Management - Datenspeicherung und Datenübertragung ins MEDUSA Netzwerk - und der Generierung von Sensorplänen. Sensorpläne sind hierbei räumlich und zeitliche Beschreibungen, wann welches Sensorsystem, wo, wie und wozu eingesetzt werden soll.
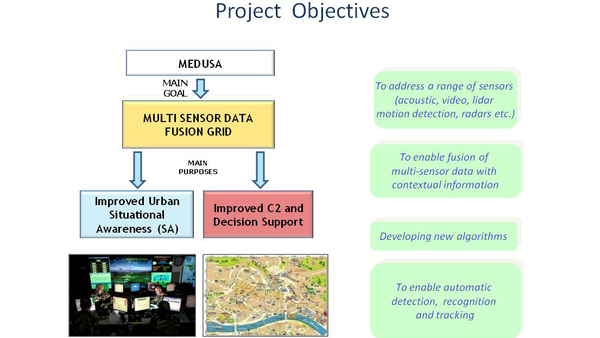
MEDUSA
Multi SEnsor Data Fusion Grid for Urban Situational Awareness
Partner in MEDUSA

Projektdaten
| Laufzeit | 2009 - 2011 |
| Auftraggeber | EDA - JIP FP |
| Projektpartner | VITROCISET, CS, CGS, PLATH, AIT, AGH, CERTH, ISL, MTA SZTAKI, INDRA |