RAMBO
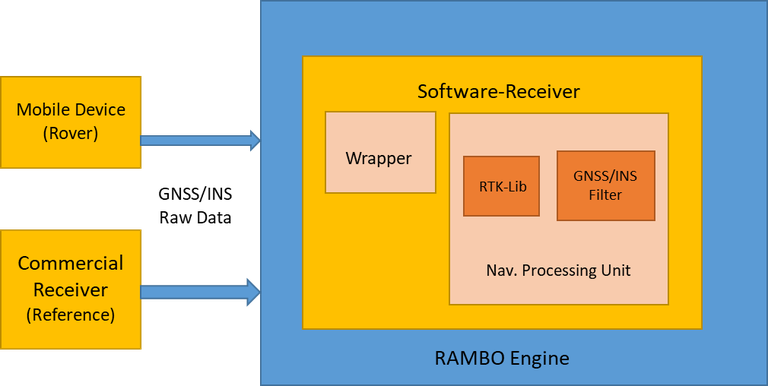
The goal of this project was to implement and test the possibility of RTK / INS positioning on mobile devices in order to achieve higher positioning accuracy. The work mainly includes the development of GNSS / INS data logger to process raw data from a mobile device, analysis of GNSS / INS raw data, implementation of GNSS / INS navigation filter for RTK process, and optimization of navigation filters by GNSS and INS Data. In this project, we investigated the feasibility of carrier-phase-based positioning with Smartphone data and highlighted limitations largely arising due to the poor antenna quality. We also show how they might be overcome e.g. by antenna calibration or coupling to the inertial sensors inside the phone. Some of the Important experiments and results conducted during this project work can be found here.
| Funded By | DLR (FKZ: 50NA1720) |
| Contact | Himanshu Sharma |
| Duration | 2018-2019 |