Universität der Bundeswehr München
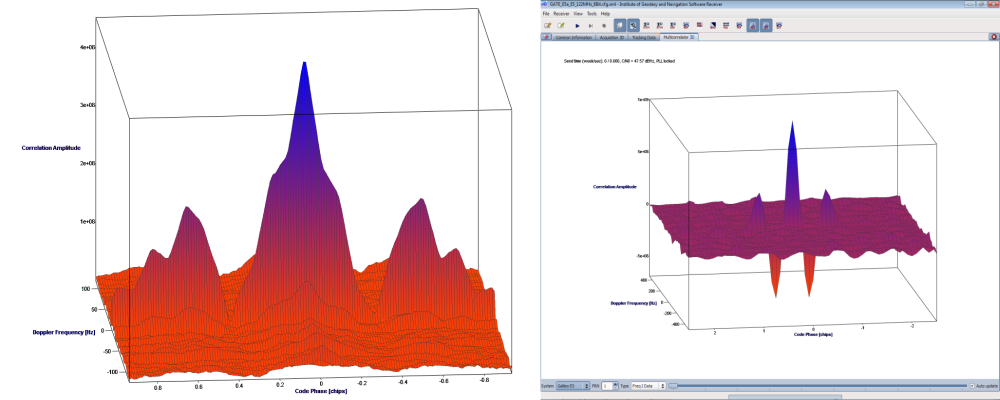
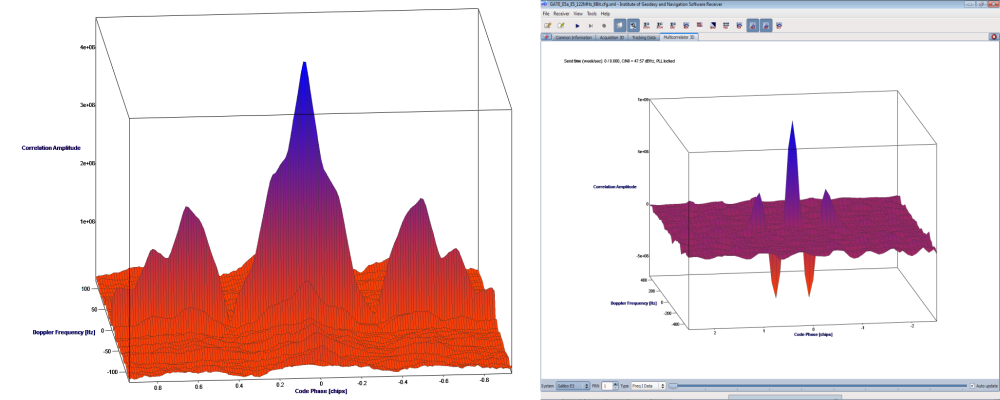
The GNSS Receiver and Simulator Group develops the Multi-Sensor Navigation Analysis Tool (MuSNAT) which is a full fledged integrated GNSS software receiver plus a GNSS signal generator.
MSRx is a MATLAB-based, research-oriented GNSS software receiver that operates on sufficient statistics (multi-correlator values) (e.g., generated by MuSNAT) to enable rapid testing of advanced tracking concepts and export RINEX observations for external RTK processing.
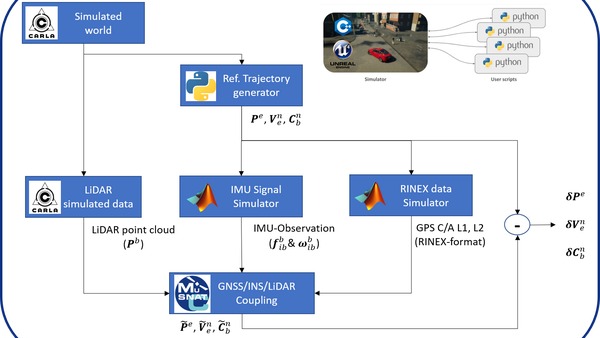
The extended SIMSS-tool (: Extended Satellite and Inertial Measurement Simulation System) is a simulation framework that allows us to generate synthetic data from GNSS, IMU and LiDAR sensors for the purpose of testing, validating and research within the MuSNAT (Multi Sensor Navigation Analysis Tool).
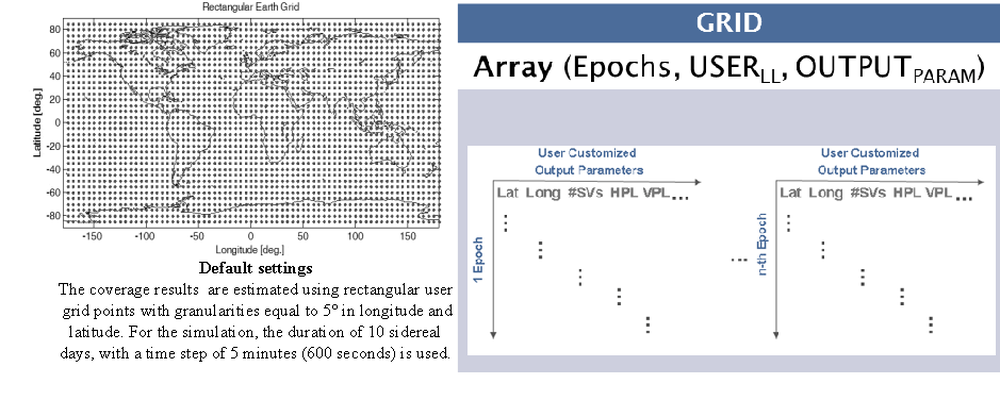
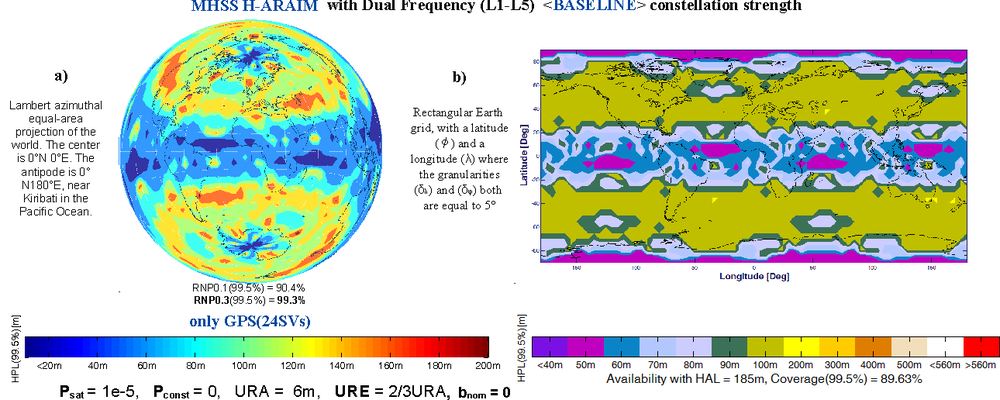
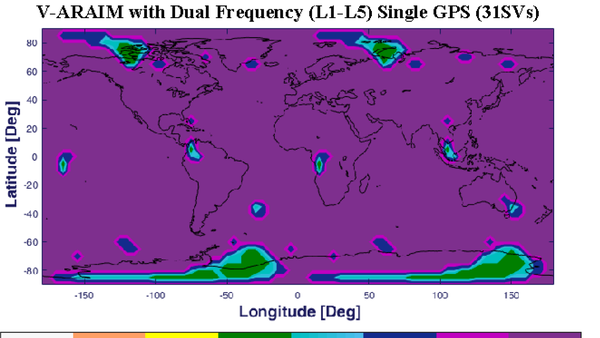
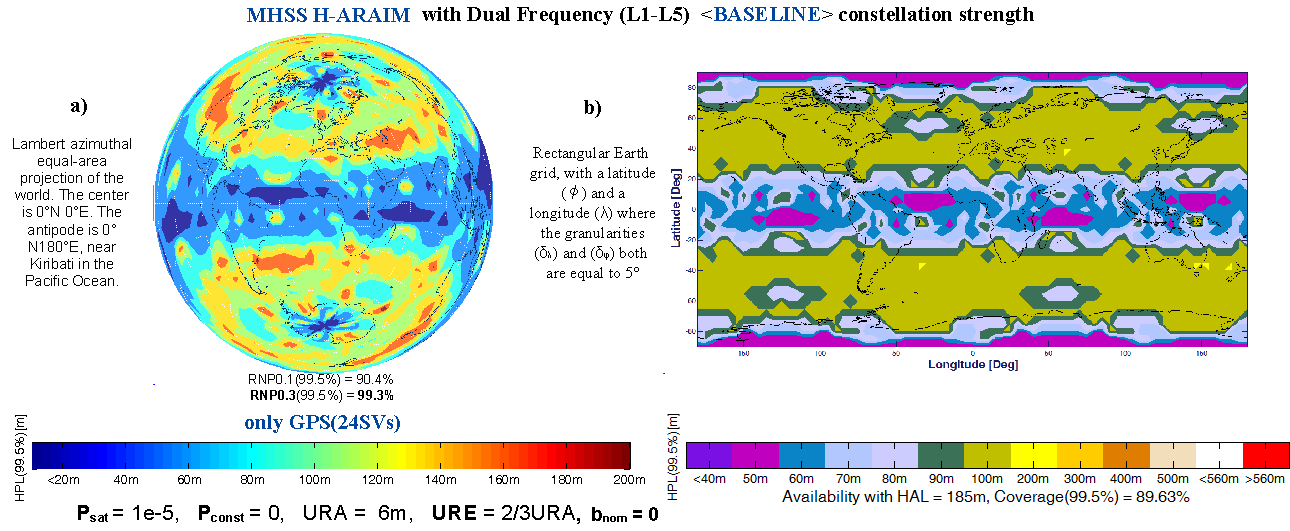
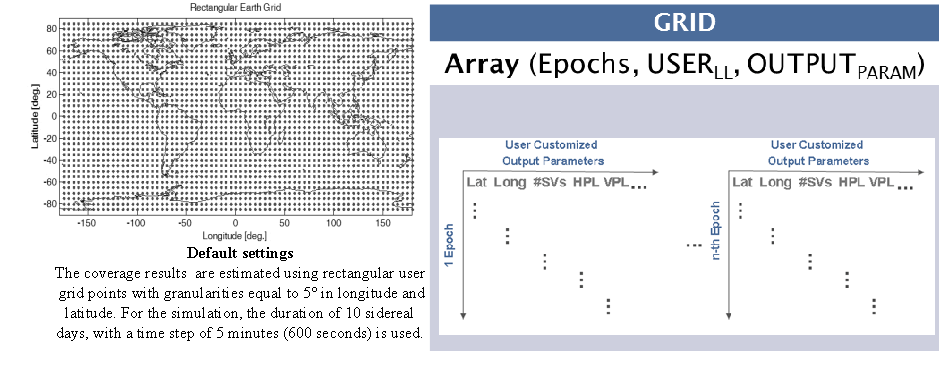
The Integrity Simulation Tool for Advanced RAIM (ISTAR) comprises modules written in Matlab language which allow for predicting the expected performance levels of augmented GNSS navigation performance using snapshot RAIM algorithms. The goal of ISTAR is the modular flexibility which helps to compare, cross-checking, and analyzing methods available in the literature.
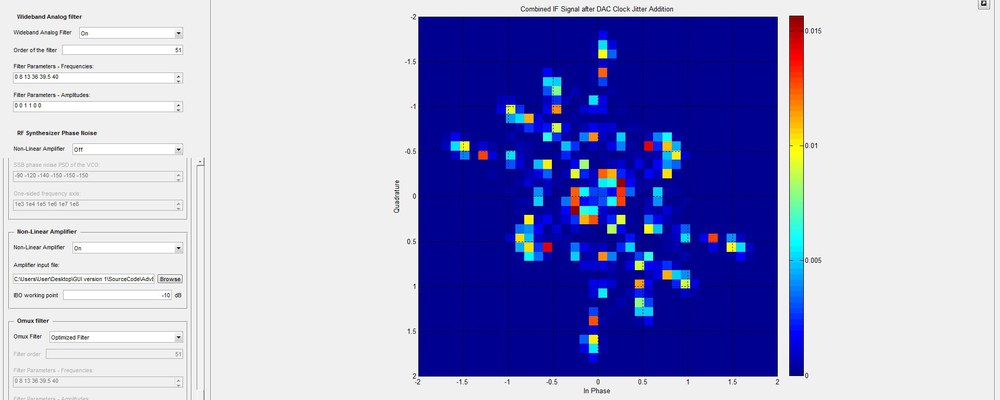
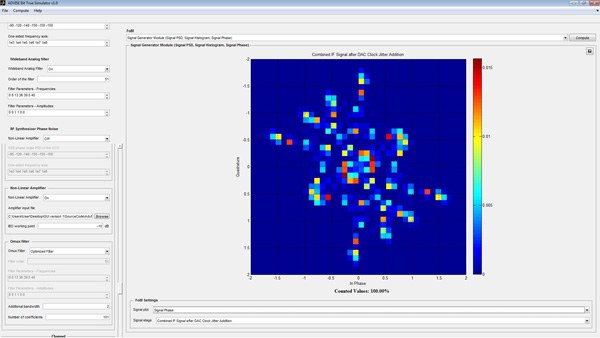
Information on the Matlab based software tools "Bit-True Simulator", the "Data Delivery Simulator" as well as the "TTFF Simulator".


{kind=link}
{kind=link}
{kind=link}
{kind=link}