synthetic sensors for automated airport operations
13 December 2022
Synthetic Training of Neural Networks for Semantic Segmentation of LiDAR Point Clouds
M Schultz, S Reitmann, B Jung, S Alam. International Workshop on ATM/CNS 2022 International Workshop on ATM/CNS
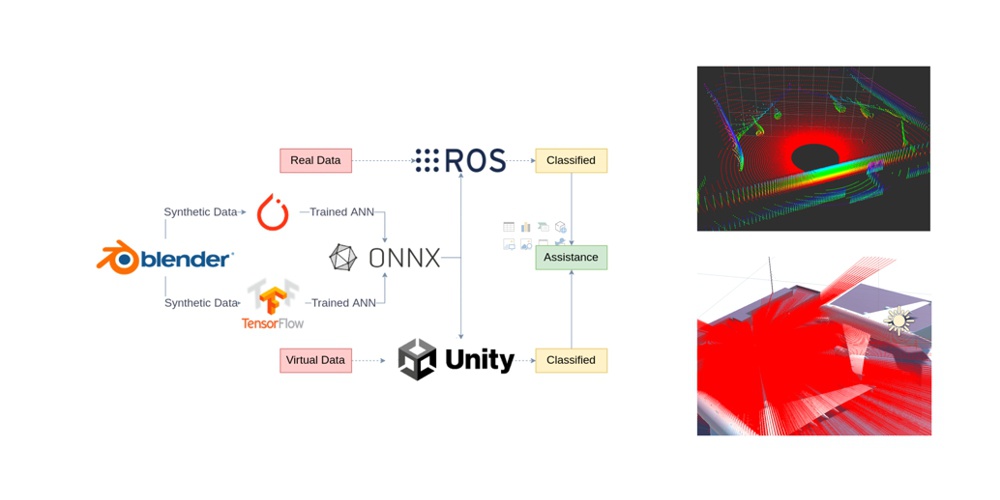
For safe operations at the airport apron, controllers are supported by an appropriate sensor environment. Deep learning models could improve the classification of observed objects, but these models require a large amount of data to be trained. Therefore, we developed a virtual airport environment to generate the required training and validation data for any operational scenario. A synthetic LiDAR sensor is implemented in this environment and applied at Singapore Changi Airport. Using different data sources, the airport infrastructure and objects are modeled, and a multitude of 3D scenes are generated. From these scenes, a point cloud is extracted from the LiDAR sensor feedback. This point cloud is already labeled by the underlying models (ground truth) and serves as input for PointNet++ to be trained for efficient segmentation and classification.
A first experimental investigation is proposed, aiming at an automated process chain to adaptively generate data for arbitrary airports and prepare deep learning methods for real-world applications. While the airport infrastructure can be generated easily from free geodata (e.g., OpenStreetMap) and repeating individual elements (ground vehicles, fingers, etc.) into three-dimensional models, the sensor technology must correspond to the characteristics of the systems used at the respective airport. In our approach, we are using parameterizable sensor modules (LiDAR) implemented in the BLAINDER (open source), which can be calibrated according to actual system requirements.
Link to publication: International Workshop on ATM/CNS 2022 International Workshop on ATM/CNS,
Presentation at Winter Simulation Conference