OPA3L
![]()
Optimal Assistierte, hoch Automatisierte, Autonome und kooperative Fahrzeugnavigation und Lokalisation (OPA3L)
With its "automated and connected driving" strategy, the German government set the course for new innovations in the automotive sector in September 2015. This defines the goal that the key technologies of Mobility 4.0 should be developed, researched, tested and produced in Germany. This goal can only be achieved if the know-how of the German scientific landscape is fully exploited. In addition to the established automotive manufacturers, the world's leading IT companies in particular are showing great interest in the future market of Mobility 4.0. This is due to the fact that innovations in this field have long since ceased to be solely engineering developments, but rather combine a variety of different disciplines (e.g., mathematics, computer science, natural sciences and technology). Real progress is sustainably achieved through interdisciplinarity. Finally, the European Commission set an example with its decision in March 2018 to establish a high-precision Galileo satellite navigation service for autonomous driving.
With conventional GNSS, it is currently not possible to ensure the accuracy and reliability requirements for direct autonomous vehicle guidance. This can be compensated by additional commercial services from third parties (SAPOS, Trimble RTX) and complex inertial measurement technology (e.g. fiber optic gyroscope), but these solutions are not suitable for the mass market due to the costs involved. Next-generation GNSS and its services, such as the GALILEO High Accuracy Service (start of test phase planned for early 2019) offers the opportunity to realize autonomous driving on a broad scale, both technically and economically. Via increased accuracy of better than 20 cm while increasing reliability to 10-7/h, camera, LiDAR or radar sensor inadequacies can be detected and compensated for, and complementary virtual road markings can be created. In combination with novel integrity information obtained from future GNSS services (GALILEO HAS) and its validation through signal authentication, the user will be able to autonomously determine the quality and reliability of his position. Within the scope of the project, an existing multi-frequency GNSS software receiver with deep GNSS/INS support will be extended for this application. For this purpose, the GALILEO HAS service will be implemented and optimized, a further support via LiDAR is realized and a novel integrity concept will ensure reliability in road traffic.
| Laufzeit: | 2019 - 2023 |
| Kooperation: | DLR Deutsches Zentrum für Luft- und Raumfahrt, Universität Bremen, IAV Automotive Engineering, ANavS Advanced Navigation Solutions |
 |
GNSS/INS/LiDAR
The integration consists in the use of the Galileo HAS, a MEMS-IMU and a LiDAR. It is also planned to propose a integrity concept being focused in the autonomous driving sector.
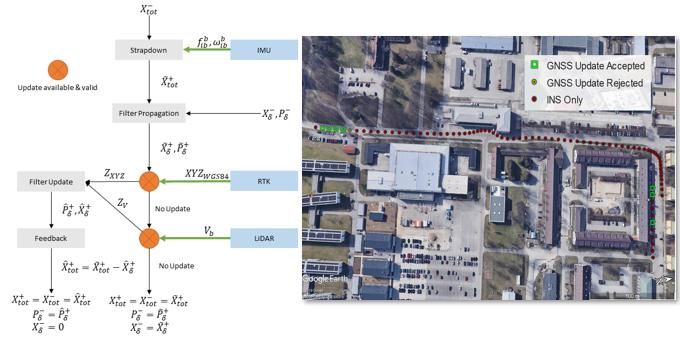
Navigation engine processing flowchart
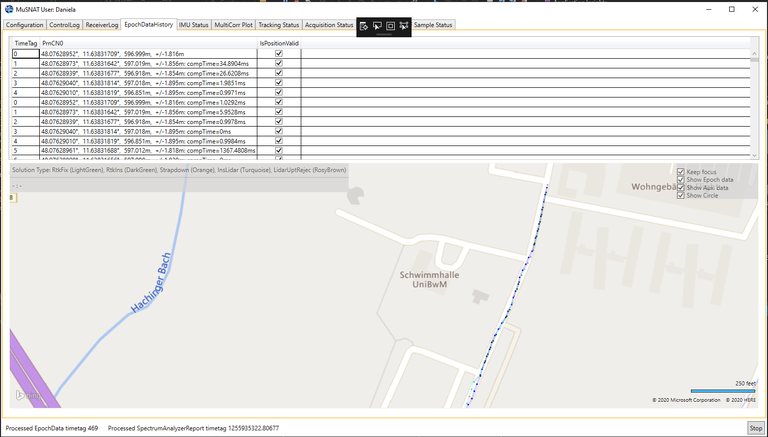
Screenshot of the MuSNAT with Map-View showing the results of the GNSS-RTK/INS/LiDAR integration from a measurement campaign at the facilities of UniBWM.
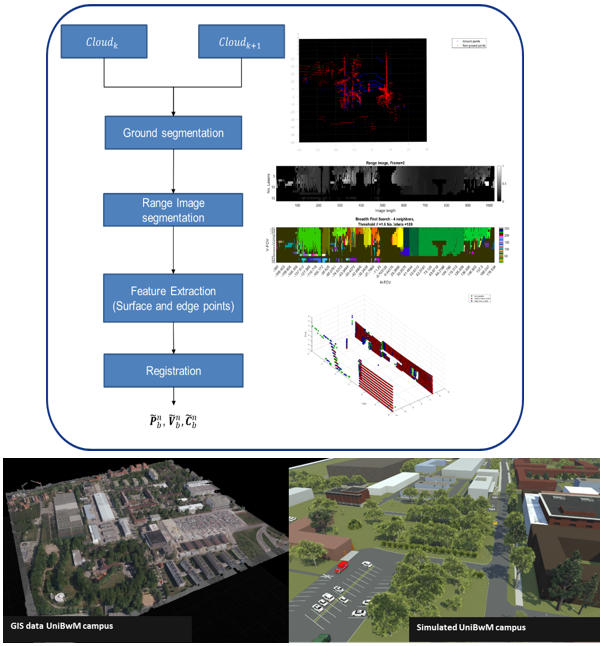
LiDAR processing flowchart
Testing and validation
Initial tests will be carried out on a Jackal robot, where our system as well as the ANAVS navigation module will be analyzed and validated. We also count with a measurement VAN that allow us to collect real data. Final testing and demonstration will be carried out in a modified WV Passat, which will do automative maneuvers.
