Extended-SIMSS
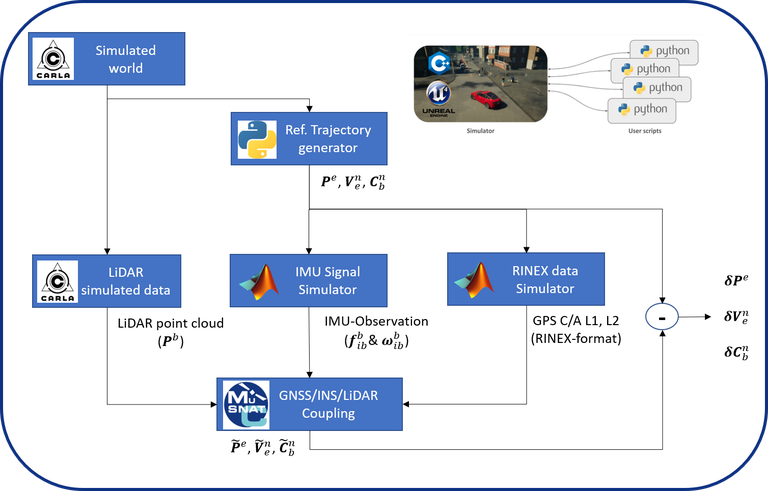
The extended SIMSS-tool is a simulation framework that allows us to generate synthetic data from GNSS, IMU and LiDAR sensors for the purpose of testing, validating and research within the MuSNAT (Multi Sensor Navigation Analysis Tool).
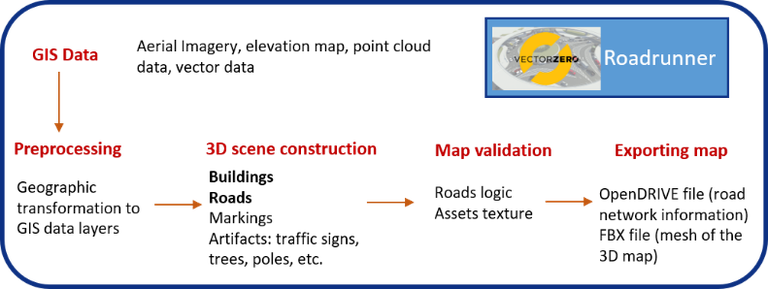
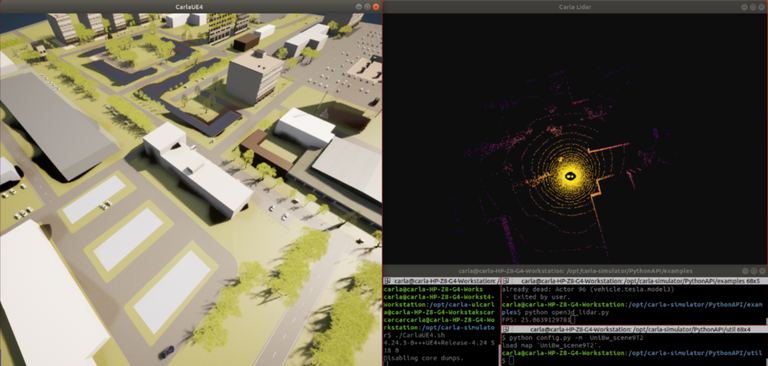
CARLA Simulated world and ingestion of maps
It is of our interest to test different type of scenarios and have complete control of the agents that compose our environment, like the road network, placement of features in the simulated world, configuration of the dynamic objects in the scene, etc. For that reason, we have also developed our own maps, which can be ingested in the simulation. By making use of GIS data as reference one can get very detailed and precise representations of the real world.
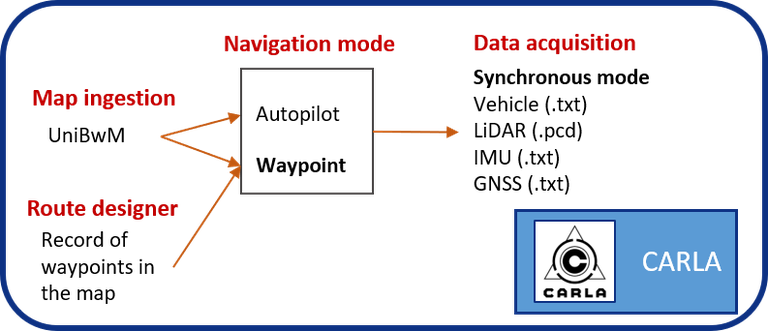
Trajectory generation
As mention before, we want to have control of the routes we are generating. For that reason, we have developed two small modules: the Route Designer and Waypoint Navigation. The first one designs the route of the vehicle by recording the locations in which the car is driving based on the input of the user, where specifications like the starting point and speed at which the car should move are stablished. The second, takes the recorded waypoints and follows the route at the same time it acquires and records the data.

LiDAR simulated data
The LiDAR sensor that CARLA offers, supports a 3D LiDAR with various configurable parameters such as the number of channels, the maximum range, the rotation rate of the lasers, the field of view (FOV), the atmospheric attenuation rate, the zero intensity limit and the noise standard deviation. This gives us flexibility in the several options in which we can configure the LiDAR in the simulation and see the respective outcome in later stages of the processing.
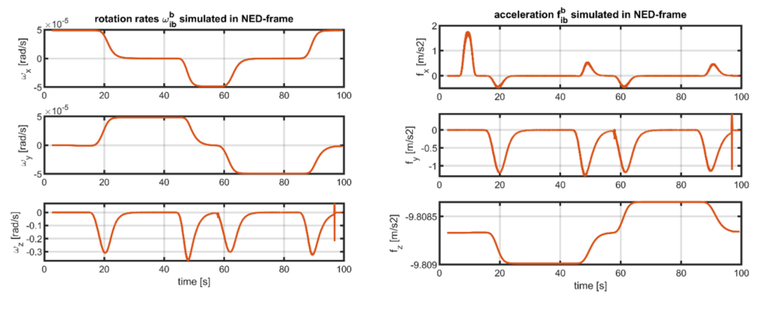
IMU Signal Simulator
The user can choose between two modes, namely the conventional strapdown mechanization equation and the inverse mechanization equation. While in the first method, the IMU observations are integrated to determine a navigation solution in three-dimensional space (position, velocity and orientation), in the inverse mechanization equation, as the name suggests, the IMU observation is generated from a trajectory in a higher-level coordinate system (e.g. WGS84) itself. In addition, the error behavior (stochastic, such as noise and constant error components such as bias offset or scale factor) of different IMU sensors can be simulated using any specification sheet from the manufacturer.
IF Samples Simulator / RINEX data Simulator
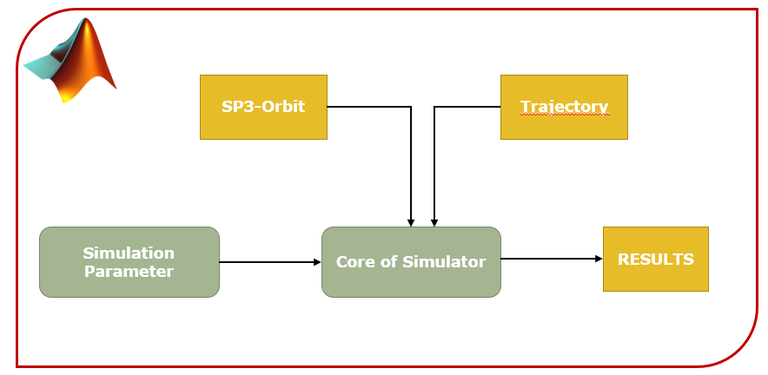
RINOS-Tool
The RINOS tool (RINEX Observation Simulator) is a MATLAB-based simulation environment that can be used to generate synthetic GPS code and phase observations for L1 & and L2 carrier frequencies, respectively, based on a given trajectory in the Earth fixed coordinate system (ECEF) and a correspondingly precise satellite orbit (SP3). These observations can additionally be converted into a receiver-independent format (RINEX) that any commercial GNSS software package can handle.
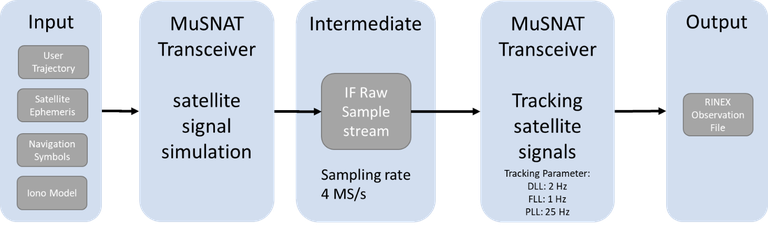
IF-Samples Simulator
Software receivers process recorded or buffered raw data of the analog GNSS antenna signal. During storage, the analog radio frequency (RF) signal is transformed to an intermediate frequency (IF) or baseband before being sampled, quantized and digitized as a discrete signal. The IF signal thus represents the first stage after the analog signal and contains the information of all GNSS constellations as well as the individual satellite signals of the respective frequency band. Therefore, an IF-sample simulator was developed at our institute. The generated digital IF data can either be processed with further GNSS software receivers or, by means of Software-Defined-Radio (SDR), converted back into an analog RF signal for further use.
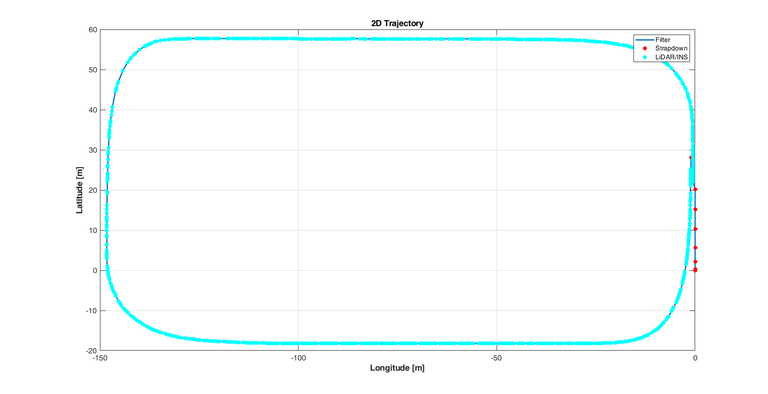
MuSNAT: GNSS/INS/LiDAR Coupling
During this integration, we have successfully demonstrated the GNSS Transceiver’s capability to synthesize RTK-processable phase data at IF and RINEX level, and its compatibility with the Closed-Loop INS simulator. The generated data has been verified by processing it with the MuSNAT-internal RTK-INS loosely coupled sensor fusion. On the other hand, we have extended the simulator to also include LiDAR data, and we have added capabilities to the IMU simulator to also accept trajectories as input. This integration has also been verified by our RTK/INS/LiDAR loosely coupled filter. The addition of LiDAR implicitly includes models of the surroundings and the environment. This would state a feasible way of introducing information for the GNSS simulation regarding obstructions and NLOS signals and is currently under evaluation. Overall, considering the Closed-Loop INS Simulator’s capability of providing IMU data of any sensor grade, the ISTA SIMSS is underway to become a valuable, multi-purpose dataset generation engine, with a wide application range especially within the scope of autonomous vehicle navigation and smartphone-based navigation.