AO-Car
AO-Car - Autonome, optimale Fahrzeugnavigation und -steuerung im Fahrzeug-Fahrgast-Nahbereich für den städtischen Bereich)
AO-Car (from its German acronym: Autonome, optimale Fahrzeunavigation und -steuerung im Fahrzeug-Fahrgast-Nahbereich für den städtischen Bereich) is a joint project financed by the German Aerospace Centre (DLR - Deutsches Zentrum für Luft- und Raumfahrt).
The aim of the project is to develop autonomous and safe driving maneuvers for (electric) cars in a city traffic scenario.
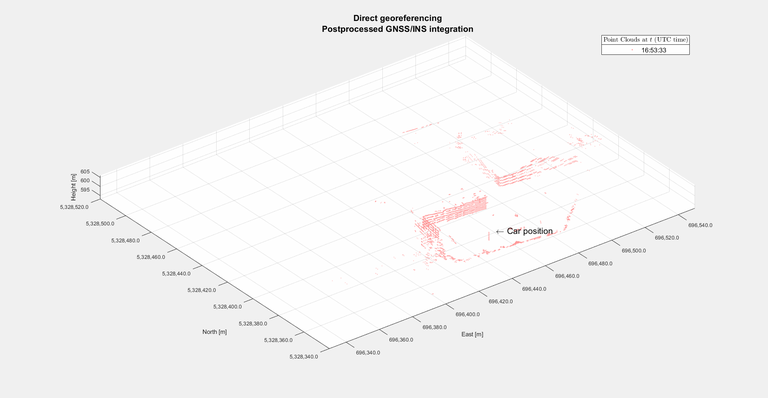
Direct georeferencing
The Professorship of Navigation is in charge of a first assessment of 3D LiDAR-based relative navigation algorithms, as well as obtaianing high-precise reference maps for absolute positionning in vehicle navigation appliactions. During AO-Car, we also provide post-processed reference trajectory to our project partner through the integration of GNSS (RTK) and INS of our measurement campaigns.
| Contact: | Daniela E. Sánchez Morales, Harvey Gómez |
| Funded by: | German Aerospace Centre (DLR) |
| Cooperation: | University of Bremen, IAV GmbH |
| Duration: | September 2016 - December 2017 |