Activity V
|
Activity V |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Objective: RTK fusion of the built-in Xiaomi Mi8 GNSS and IMU observation |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
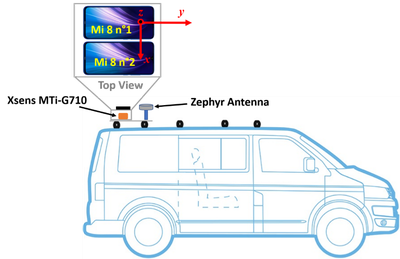
Measurement setup:
1 * commercial MEMS IMU from XSENS (MTi-G-710) à for comparisons reasons Trimble NetR9 + Trimble Zephyr 2 geodetic antenna à for comparisons reasons · Reference station, Trimble NetR9 Two smartphones were fixed on a 3D printing platform For comparison reasons, a commercial XSENS MTi-G-710 was placed immediately under the two smartphones so that the lever-arm can be neglected. In the front of the bus, a geodetic antenna from Trimble was mounted and connected to a high accuracy geodetic receiver from Trimble (NetR9), which builds the ground truth trajectory.
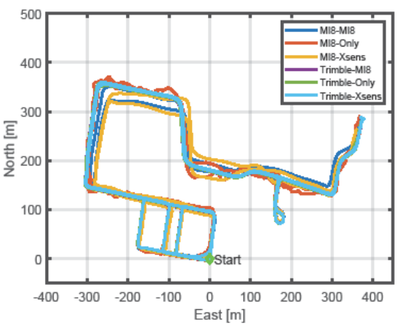
Reference data were collected by means of a static Trimble NetR9 receiver which is located on Building 41 at the UniBWM campus. The experiment took place at the UnibWM campus for a duration of 15 minutes. The trajectory contains all possible scenarios, eg static, kinematic, fully open sky, signal blockage due to higher building in the campus and foliage / trees |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Processing tools
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Results: RTK fixing ratio of different GNSS / IMU combinations
Deviation of the north coordinates from the ground truth solution (Trimble-Xsens)
Deviation of the east coordinates from the ground truth solution (Trimble-Xsens)
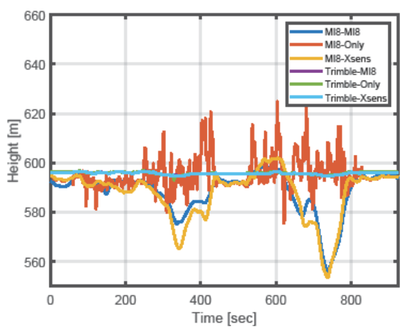
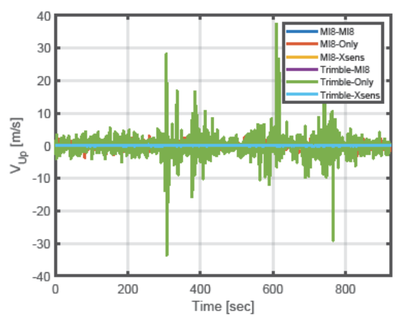
Deviation of the height coordinates from the ground truth solution (Trimble-Xsens)
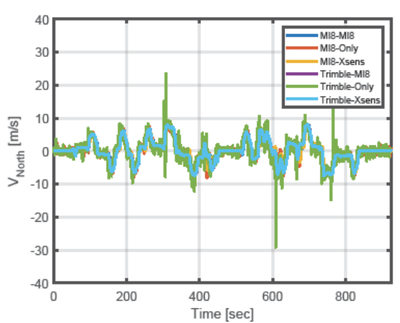
Deviation of the north velocity from the ground truth solution (Trimble-Xsens)
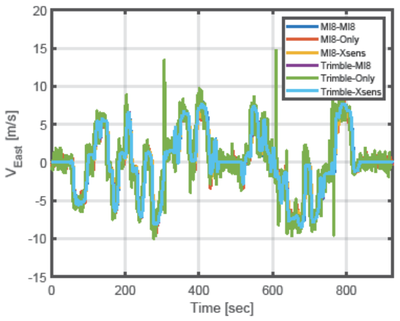
Deviation of the east velocity from the ground truth solution (Trimble-Xsens)
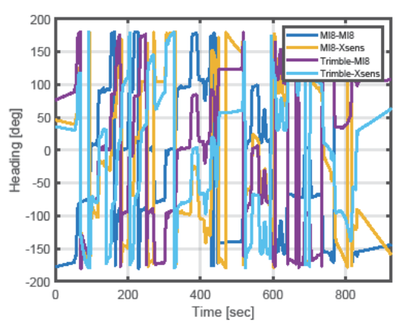
Deviation of the heading angles from the ground truth solution (Trimble-Xsens)
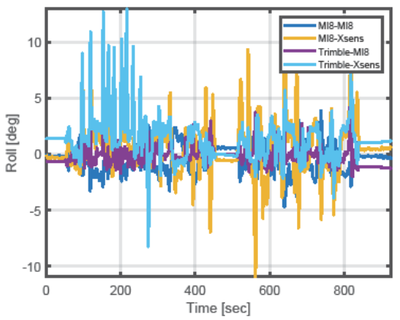
Deviation of the roll angles from the ground truth solution (Trimble-Xsens)
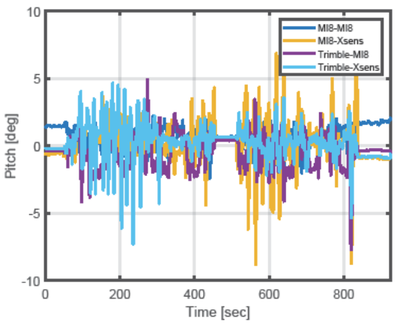
Deviation of the pitch angles from the ground truth solution (Trimble-Xsens)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Log files: Coming Soon.
|