![]() VaMEx, die Abkürzung für Valles Marineris Explorer, ist eine innovative Missionsstudie mit dem Ziel, die Schlucht des Valles Marineris-Tals, die sich von Ost nach West über etwa 4000 km und 7 km in der Nähe des Marsäquators erstreckt, für die Dauer eines Jahres zu untersuchen.
VaMEx, die Abkürzung für Valles Marineris Explorer, ist eine innovative Missionsstudie mit dem Ziel, die Schlucht des Valles Marineris-Tals, die sich von Ost nach West über etwa 4000 km und 7 km in der Nähe des Marsäquators erstreckt, für die Dauer eines Jahres zu untersuchen.
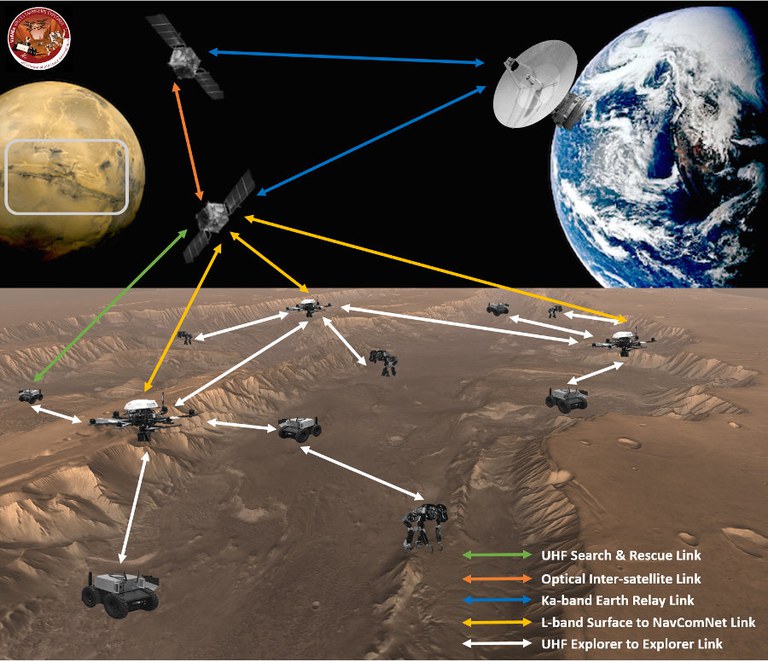
VaMEx besteht aus einem Schwarm von mehreren robotischen Elementen: Raupenroboter, Oberflächenmobilitätsroboter und Luftfahrzeuge. Es ist vorgesehen, dass sich diese Nutzer selbständig entlang der Valles Marineris verteilen, während sie ihre gemeinsamen Erkundungsaufgaben durchführen. Aufgrund der gefährlichen Umgebung ist es erforderlich, dass diese Elemente während der Betriebsphase der Mission autonom navigieren, Positionsinformationen ausstrahlen und wissenschaftliche Daten austauschen. Zur Unterstützung dieser Funktionen wird ein marsianisches Raumsegment vorgeschlagen. Dieses Raumsegment wird als VaMEx NavComNet bezeichnet.
Das NavComNet hat das konkrete Ziel, als echtzeitnahes Positionierungssystem für Oberflächen-, Luft- und potenzielle raumgestützte Nutzermissionen, als Wissenschaftsdaten-, Telemetrie- und Telekommando-Relais zwischen der Erde und den in-situ Nutzermissionen sowie als Cross-Communication-Relais zwischen den Nutzern zu dienen. Um ein geeignetes Konzept für das VaMEx NavComNet zu entwickeln, werden drei verschiedene Schwarm-Lokalisierungsarchitekturen untersucht: 1) Radio-Positionierung, 2) kartographische Triangulation von Bodenmerkmalen aus optischen Bildern und 3) kartographische Triangulation von radarpersistenten Streuungen. Die erste Methode, die Radio-Positionierung, beruht auf der Beobachtung der Reichweite und der Dopplerverschiebung eines HF-Signals, das zwischen Anbieter und Nutzer übertragen wird. Ein gutes Beispiel für eine solche Architektur, die keine Zeitsynchronisation zwischen den Elementen erfordert, sind weit verbreitete Global Navigation Satellite Systems (GNSS). Die zweite Methode besteht in der Detektion und Verfolgung von Schwarmelementen durch den Vergleich von topografischen Merkmalen, die aus optischen Bildern extrahiert wurden. Das dritte Konzept ist das Synthetic Aperture Radar (SAR), bei welchem Wechselwirkungen mit dem auftreffenden Radarsignal erkannt und zur Triangulation der Position des Benutzers genutzt werden können.
Für jedes der vorgeschlagenen Navigationskonzepte wird eine Bahnkonstellationslösung vorgeschlagen. Jede Lösung wird in Bezug auf Orbitabbau/Stabilität, Steuerungsaufwand und Navigationsleistung anhand von Metriken analysiert, die für jedes der drei Konzepte spezifisch sind (Auflösung, Sichtbedingungen, Passlänge, etc.). Mit dem beschriebenen Navigationskonzept und den Ergebnissen der Missionsanalyse wird eine vorläufige operative Architektur für das Raumsegment VaMEx NavComNet unter Berücksichtigung vorhandener Technologien, Navigationsleistung, Gesamtkomplexität und Machbarkeit konzipiert. Des Weiteren werden derzeit alternative kostengünstige Lösungen, bestehend aus einem einzelnen Satelliten oder Nanosatelliten, untersucht.
Dieses Projekt wird vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) unterstützt und vom Bundesministerium für Wirtschaft und Energie (BMWi) gefördert.