Aus den Untersuchungen und Entwicklungsarbeiten aus KaNaRiA haben sich verschiedene Bereiche für die Erkundung von Asteroiden mittels in-situ Messungen als essentiell herausgestellt. KaNaRiA-NaKoRa greift Technologien zur gezielten Landung auf Asteroiden, die Erkundung von Schwerefeld, Topographie und Ressourcenlokalisierung auf, sodass deren Verfügbarkeit für zukünftige Missionen zur Erforschung von Kleinkörpern wie Asteroiden, Kometen und Monden nachweisbar ist und somit dieser Art von Missionen den Weg bereitet.
![]()
Das Ziel von KaNaRiA-NaKoRa ist hierbei die hardwarenahe Entwicklung der Navigation der Landeeinheiten für kleine planetare Körper wie Asteroiden, Kometen und Monde. Am Ende des Vorhabens sollen die notwendigen Methoden, Algorithmen und Sensorik für die Navigation und
Steuerung der Landeeinheiten im Nahfeld von planetaren Kleinkörpern entwickelt, validiert und in einem relevanten Umfeld getestet sein, sodass der nächst höhere „Technology Readiness Level“ (TRL) erreicht wird. Hierzu wird eine entsprechende Entwicklungs- und Validierungsumgebung aufgebaut, die die notwendigen Tests in einer emulierten Mikrogravitationsumgebung zulässt.
Diese Validierungsumgebung stellt ein zentrales Element dar, da nur sie erlaubt, Algorithmen, Methoden, operationelle Abläufe und Flugsteuerungen in einer Form zu testen, wie sie auch auf den Raumfahrzeugen zum Einsatz kommen, ohne sie für die Anwendung im Erdumfeld modifizieren zu müssen.
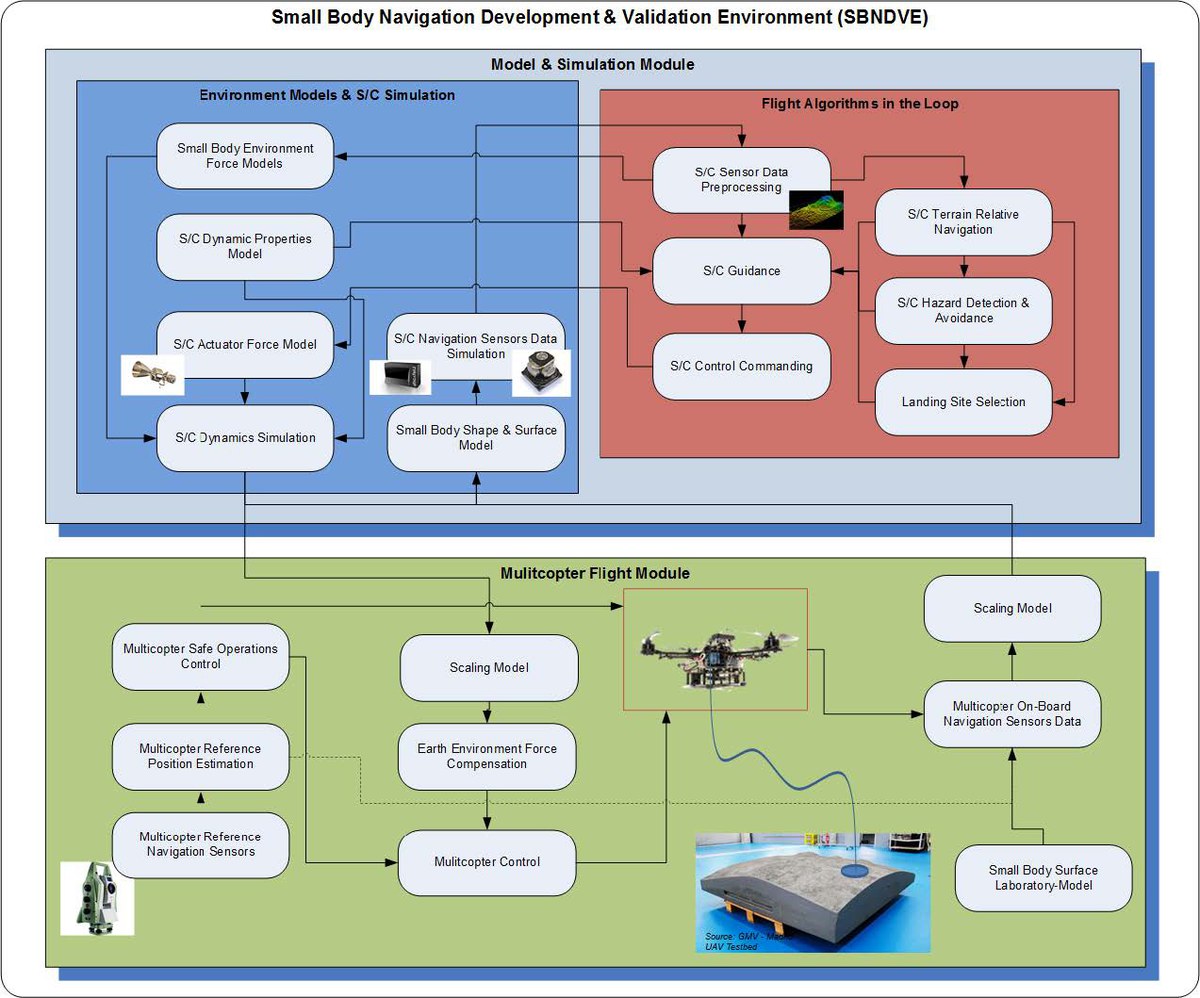
 r die Navigation zur Landung auf einem planetaren kleinen Körper geeignet sind. Da diese hierfür nicht modifiziert werden müssen, sondern in der Ausprägung, wie sie später auf einem realen Raumfahrzeug zum Einsatz kommen, getestet und validiert werden können, ist mit dem erfolgreichen Einsatz der Algorithmen im SBNDVE ein Erreichen von TRL 5 gegeben.
r die Navigation zur Landung auf einem planetaren kleinen Körper geeignet sind. Da diese hierfür nicht modifiziert werden müssen, sondern in der Ausprägung, wie sie später auf einem realen Raumfahrzeug zum Einsatz kommen, getestet und validiert werden können, ist mit dem erfolgreichen Einsatz der Algorithmen im SBNDVE ein Erreichen von TRL 5 gegeben.