Telerobotiksysteme sind gekennzeichnet durch die räumliche Entkoppelung von Mensch (Bediener, Operierender) und Roboter (Ausführungseinheit, Teleoperator). Sie kommen zum Einsatz, wenn
- der Arbeitsraum zu weit entfernt ist,
- der Arbeitsraum zu klein oder zu groß ist,
- der Arbeitsraum zu gefährlich ist.
Teleoperationssysteme finden in den verschiedensten Bereichen Anwendung, wie z.B. dem On-Orbit-Servicing von Satelliten, dem Rohstoffabbau in der Tiefsee oder der Telechirurgie. Die Arbeiten an unserem Institut konzentrierte sich auf die Bereiche
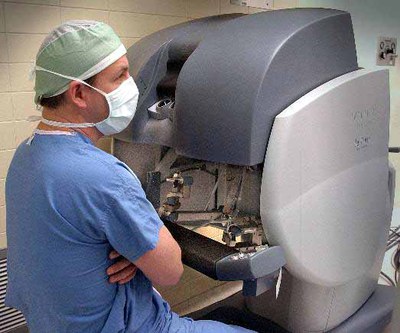
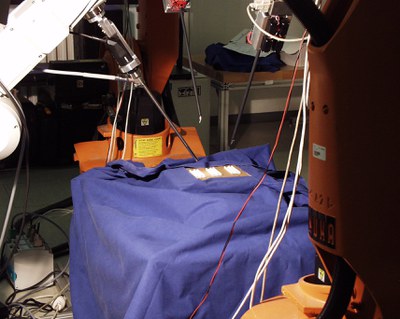
- minimalinvasive Chirurgie
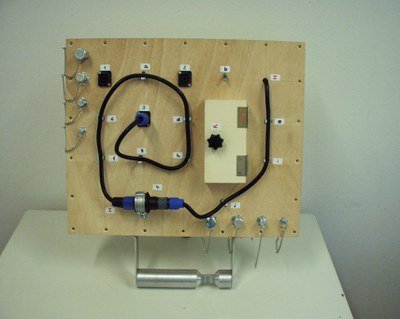
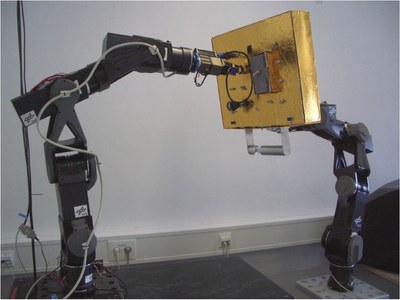
- Kampfmittelentschärfung
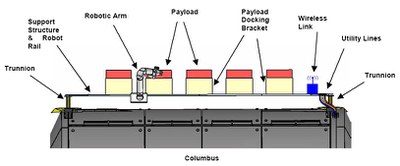
- Raumfahrtanwendungen (On-Orbit-Servicing)
Aus psychologischer Sicht sind bei diesen speziellen Mensch-Maschine-Schnittstellen folgende Schwerpunkte und deren Auswirkung auf die menschliche Informationsverarbeitung interessant:
- Auf der Operatorseite müssen die Eingabegeräte eine möglichst schnelle und fehlerfreie Steuerung des entfernten Roboters ermöglichen. Gleichzeitig muss der Operator mit allen Informationen über die Umstände versorgt werden, die in der entfernten Umgebung herrschen. Dazu gehören dort wirkende Kräfte, Raumposition von Objekten, Beschaffenheit von Oberflächen, etc.
- Auf der Teleoperatorseite müssen geeignete Sensoren eingesetzt werden, die dem menschlichen Benutzer die relevanten Informationen über die entfernte Umgebung zurückmelden.
- Auf der Kommunikationsebene entstehen bei diesen Systemen spezielle Probleme wie beispielsweise Zeitverzögerungen und Verzerrungen durch Datenverluste.