From a modern perspective, the approach used in the early days of electronic navigation systems in motor vehicles seem archaic. It was based on seafaring, where directions such as “destination xx miles to the east” were useful information.
At the time, lack of access to GPS tracking information (which had technically been available since 1985), missing digital road map data and the physical size limitations of storage media meant that direction and route finding in motor vehicles had to rely on an electronic compass and wheel rotation sensors.
CITYPILOT
In 1984, a simple idea for entering destinations and displaying navigational information was introduced.
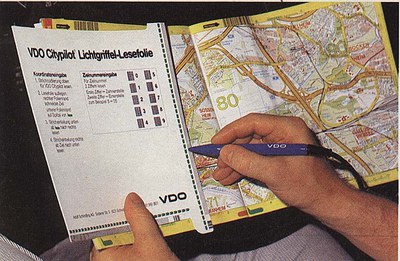
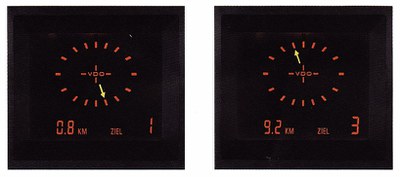
Users of the system, which was intended for navigation in cities, used a specially developed road map and a bar code scanner to enter their starting and destination coordinates. The display in the vehicle continuously showed the distance and direction to the destination in a straight line. The system itself did not know any streets and was useful only in cities built along precise geometric lines (grid pattern such as in Mannheim). It failed, however, where direct routing was not possible because of geographic obstacles such as rivers and mountains. Since it always indicated the direction in terms of the points of the compass, there was no information about any hidden passages and turns.
Our own tests using these systems in Stuttgart showed that one group of users coped well with this simple navigational aid. Others regularly failed and got stuck in dead-end streets or searching side streets for a way across the river. These people made the mistake of responding to any little movement of the direction arrow, whereas the more successful group waited until the direction arrow steadily recommended a right-angle turn relative to the current direction of travel. In conclusion, it appears that people with a good sense of spatial orientation and a sense of direction benefit from the system. Those who struggle with orientation, however, are not sufficiently able to apply the somewhat abstract information provided on the display to the road network in such a way that they would benefit from this technical solution.
Travelpilot (Bosch/Blaupunkt)
In 1989, Blaupunkt began series production of “the first autonomous destination-finding and navigation system for use on European roads.”
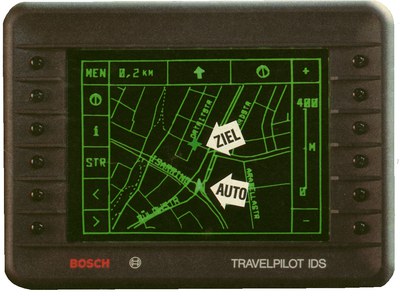
It processes data of an electronic compass and the rotational momentum of the wheels together with stored roadmap data. A monochrome display shows the map section, including the current position of the vehicle. The map section rotates depending on the position of the vehicle within the terrestrial magnetic field, with the current direction of travel always at the top. Since storage capacity was very limited due to the size of available hard disk storage devices, only few map data could be brought along.
LISB (Leit- und Informationssystem Berlin) [Guidance and Information System Berlin]
The LISB in (West) Berlin was based on the same sensor technology to display distance and direction. Additionally, the city was divided into grid squares with a side length of about 400 meters each. At the edges of these squares, traffic lights were equipped with infrared transmitters and receivers, which all communicated with a mainframe computer. A fleet of test vehicles was also equipped with such transmitting and receiving devices, a visual display, voice output and a data entry keyboard.
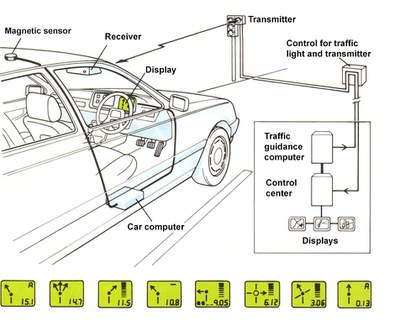
At the start of every test drive, drivers entered their current position and their destination in plaintext (street, house number). Instructions initially resembled those given in CITYPILOT (general direction and distance). Upon passing the first transmitting/receiving traffic lights, information about the position and destination of the vehicle was transmitted to the central computer. The computer determined the optimal route through the square the vehicle had just entered and sent back this information to the vehicle, where it was displayed to the driver. The visual display showed instructions such as “Continue along this road” (see figure, top, second figure from left) or indicated when to make a turn by means of a bar symbol to represent the distance. Complex junctions or traffic circles were indicated with symbols, too. The visual display was accompanied by a corresponding voice output. Upon entering the next square, data were exchanged again and the old data in the vehicle were overwritten by new ones.
About 20 drivers who were unfamiliar with the streets of Berlin went on test drives either with a conventional city map or with the LISB. Results showed that 17% of the total driving time was spent looking at the LISB, although that tended to become less with practice as this type of navigation supported by LISB was completely new to the test persons. Test drivers who used a conventional map were not allowed to look at it while driving. The total time spent reading the map while the vehicle was stopped was considerable and errors occurred more often, which increased the overall driving time of the map users compared to those who used LISB in order to reach the destination. The driving time of LISB users was even significantly shorter than that of the map users. The differences were greater among older people in particular.
The system served as an early indicator of the potential of mobile navigation systems in vehicles. Large-scale implementation, however, was doomed because of the disproportionately great effort and expense necessary for the installation and operation of the required infrastructure.