Telerobotic systems are characterized by the human (operator) and the robot (executing unit, teleoperator) being located in different places. They are employed if
- the workspace is too far away,
- the workspace is too small or too big,
- the workspace is too dangerous.
Teleoperation systems are used in all kinds of areas, including on-orbit satellite servicing, deep-sea mining and telesurgery. Our work in this area here at the institute has focused on:
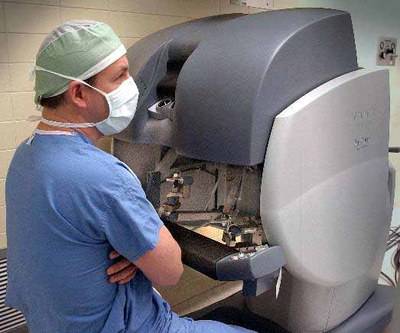
- minimally invasive surgery,
- explosive ordnance disposal,
- space applications (on-orbit servicing).
When it comes to these special human-machine interfaces, the following issues and their effects on human information processing are of interest from a psychological perspective.
- On the operator’s side, input devices must make it possible to control the remote robot with minimal delay and error. At the same time, the operator must be provided with all relevant information on the conditions of the remote environment, including relevant forces in action, the position of objects in space, the texture of surfaces, etc.
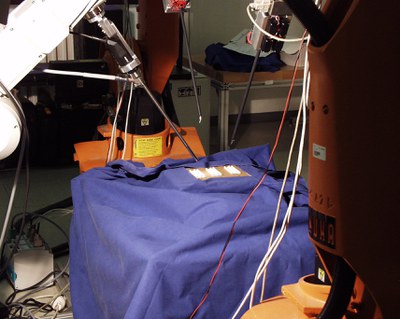
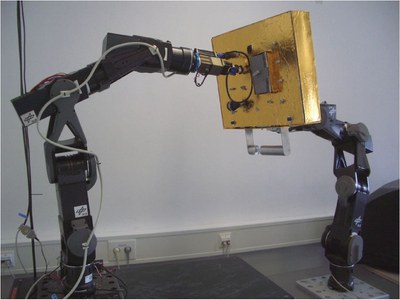
- On the teleoperator’s side, appropriate sensors must be used to provide the human user with information on the remote environment.
- On the communication level, specific problems associated with these systems include time delays and distortions caused by data loss.