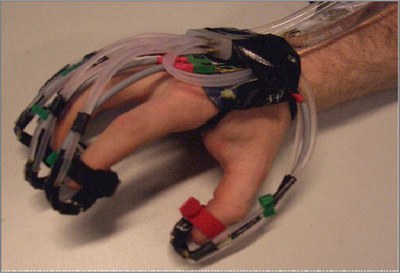
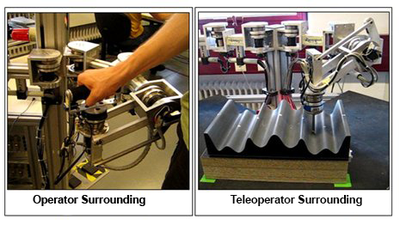
If the operator and the teleoperator are located far apart and bandwidth is limited, there will be lags or gaps in data transmission. Delayed or missing feedback leads to impaired performance. This problem can be solved with what we know about perception.
Weber’s law states that the just-noticeable increase in the intensity of a stimulus is a constant proportion of the intensity of the initial stimulus.


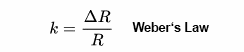
If you light a candle in a dark room, the difference in brightness is obvious. If, however, 50 candles are already burning and you add one more, the difference will not be noticeable.
Perception-Based Data Compression
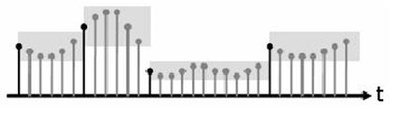
This principle can be applied to the compression of haptic data in order to reduce the data transmission rate. Only the black values are transmitted (see above). Only when there is a significant change will a new value be transmitted. This makes it possible to reduce the data rate by more than 90% without impairing perceived quality or task performance.
Literature
Nitsch, Verena; Kammerl, Julius; Färber, Berthold; Steinbach, Eckehard: "On the Impact of Haptic Data Reduction and Feedback Modality on Quality and Task Performance in a Telepresence and Teleaction System". In: Kappers, A.M.L. et al. (EDs.): Haptics: Generating and Perceiving Tangible Sensations. International Conference, EuroHaptics 2010, Amsterdam, July 2010, Proceedings, Part I. - Pp. 169 – 176. Springer-Verlag Berlin.
Kammerl, Julius; Vittorias, Iason ; Nitsch, Verena; Färber, Berthold; Steinbach, Eckehard; Hirche, Sandra: "Perception-Based Data Reduction for Haptic Force-Feedback Signals Using Velocity-Adaptive Deadbands". In: Presence, Teleoperation and Virtual Environments, 19, 2010, 5. – Pp. 450-462. MIT Press.
Freyberger, Franziska: "Gestaltung visuell-haptischer Telepräsenz- und Teleaktionssysteme mittels psychologischer Grundlagen". Dissertation UniBw, 2008.
Pongrac, Helena; Leupold, Jan; Behrendt, Stephan; Färber, Berthold; Färber, Georg: “Human Factors for Enhancing Live Video Streams with Virtual Reality, Performance, Situation Awareness, and Feeling of Telepresence” In: Presence : Teleoperators and Virtual Environments, MIT Press, 2007, S. 488-508.