Skip to main content
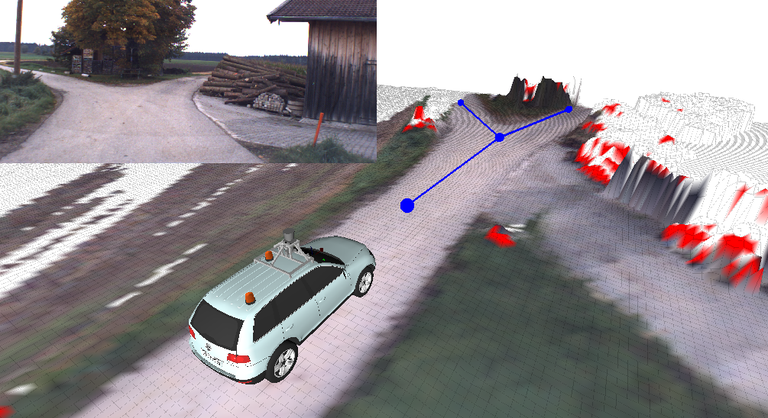
Straßenerkennung spielt im Bereich des autonomen Fahrens eine entscheidende Rolle. Im normalen Straßenverkehr gibt es dabei zumeist eindeutige Fahrbahnmarkierungen oder andere Anhaltspunkte, die das Tracking vereinfachen. An unseren Institut werden dagegen größtenteils unstrukturierte Feldwege getrackt. Zusätzlich werden dabei die Abzweigungen erkannt und in einer Karte eingetragen. Als Basis für das Tracking dient die am Institut entwickelte lokale Umgebungskarte, die Sensordaten aus LiDAR und Kamera miteinander fusioniert. In dieser Karte wird die Straße mit Hilfe eines Partikelfilters getrackt.