Ein weiterer Teil unserer Forschung stellen Stereosysteme dar. Für den Menschen selbst sind die Augen der wichtigste Sensor beim Autofahren.
Stereosysteme sind im Gegensatz zu Radar bzw. LiDAR passiv. Sie nehmen die Umgebung war, ohne selbst Signale aussenden zu müssen. Dabei bieten sie eine sehr hohe Auflösung bei vergleichsweise geringen Kosten.
Zu den Forschungsschwerpunkten gehören:
- Optimale Annordnung von Stereokameras bezüglich Position, Ausrichtung und Optik
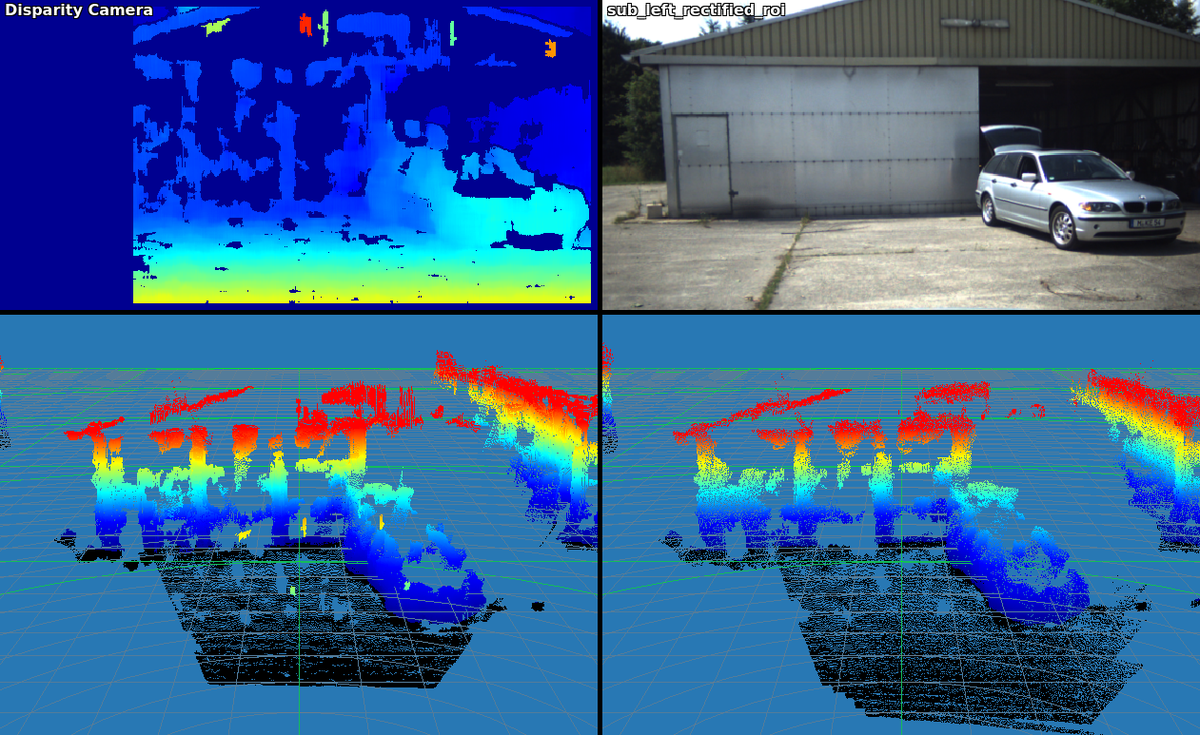
- Entwicklung bzw. Integration von Stereoalgorithmen zur Rekonstruktion der Umgebung
- Rekursives Schätzen der Umgebung mittels Motion-Stereo
- Untersuchung von geeigneten Umgebungsmodellen.
Dabei liegt das Augenmerk auf der Echtzeitfähigkeit und Robustheit der entwickelten Algorithmen. Die erzeugte Umgebungsschätzung dient in weiteren Schritten als Basis für die Pfadplanung des Autos.