Beim Tracking dynamischer Objekte ist das Ziel die 3D-Pose sowie die Ausdehnung eines Objektes mittels rekursiver Verfahren (Bayes-Filter) zu schätzen. Dabei werden Multi-Objekt-Filter, beispielsweise der PHD-Filter, sowie Single-Objekt-Filter (Unscented-Kalman-Filter, Extended-Kalman-Filter) mit hinterlagertem Trackmanagement benutzt. Des Weiteren werden Erweiterungen des Filteransatzes für ausgedehnte Objekte untersucht. Eine moderne Methode um ausgedehnte Objekte zu tracken sind zum Beispiel Gaussian-Processes. Schlussendlich spielt die Wahl der Mess- sowie Prozessmodelle eine entscheidende Rolle.
Single-Sensor Tracking dynamischer Objekte
Anwendungen an unserem Institut
Multi-Objekt Tracking
Multi-Objekt Tracking
Besondere Herausforderungen beim Multi-Objekt-Tracking sind die unbekannte Anzahl an Objekten sowie die Datenassoziation.
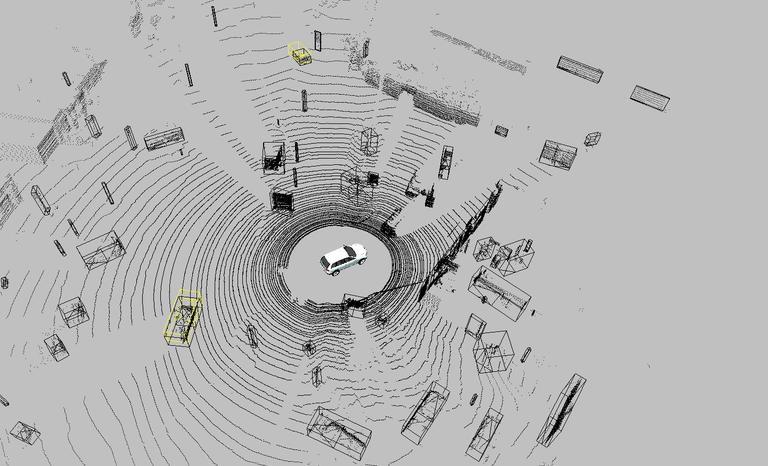
Single-Object Tracking für Konvoi/Mule Szenario
Single-Object Tracking für Konvoi/Mule Szenario
Beim Trackingpart des Konvoi-/Muleszenarios ist es wichtig die Position, Geschwindigkeit sowie Ausrichtung eines bestimmten Objektes, beispielsweise Führungsfahrzeug, möglichst genau zu schätzen.
