Skip to main content
Universität der Bundeswehr München
en
Suche
Intern
Professur
Team
Aktuelles
Wettbewerbe
Kontakt und Anfahrt
Forschung
Publikationen
Ausstattung
Testgelände
MuCAR-3
MuCAR-4
MiniMuCAR
IT-Infrastruktur
Historische Versuchsträger
LiDAR
Computer Vision
Tracking dynamischer Objekte
Multimodales Umgebungsmodell
Navigation/Planung
Weg-/Kreuzungserkennung
Regelung
Eigenbewegungsschätzung
Laufende Projekte
Abgeschlossene Projekte
Lehre
Grundlagen der Messtechnik (Bachelor)
Filter- und Schätzverfahren (Master)
Sensortechnik (Master)
Autonome Systeme (Master)
Prozessrechentechnik (Master)
Praktikum (Master)
studentische Arbeiten
Institut↑
Karriere
wissenschaftliche Mitarbeiter/Doktoranden
studentische Arbeiten
Navigation/Planung
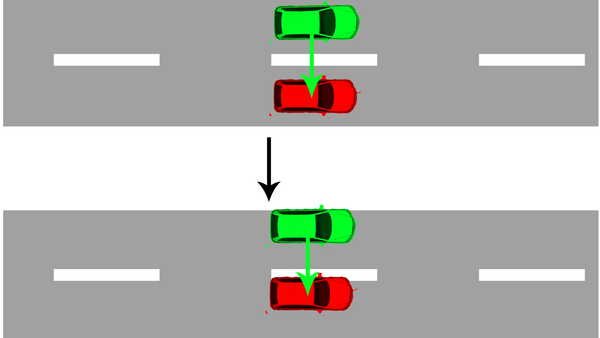
Landmarkenbasierte Navigation
Mehr…
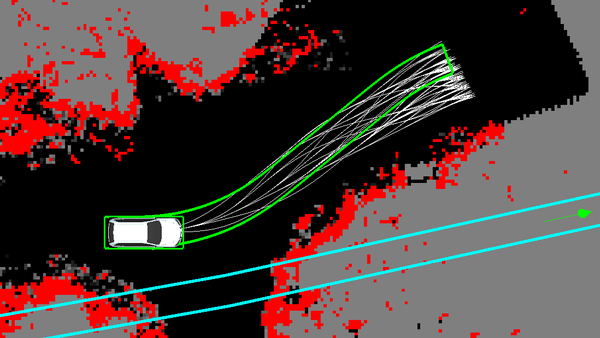
Trajektorienplanung
Mehr…
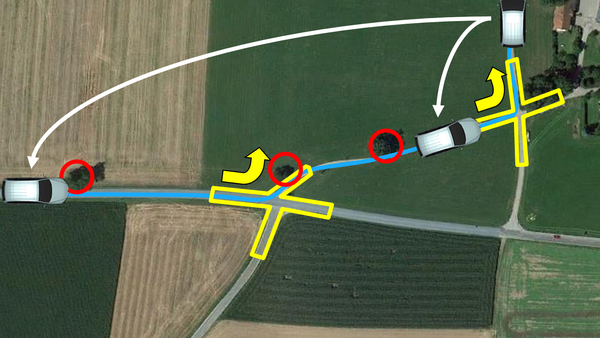
Objektrelationale Navigation
Mehr…