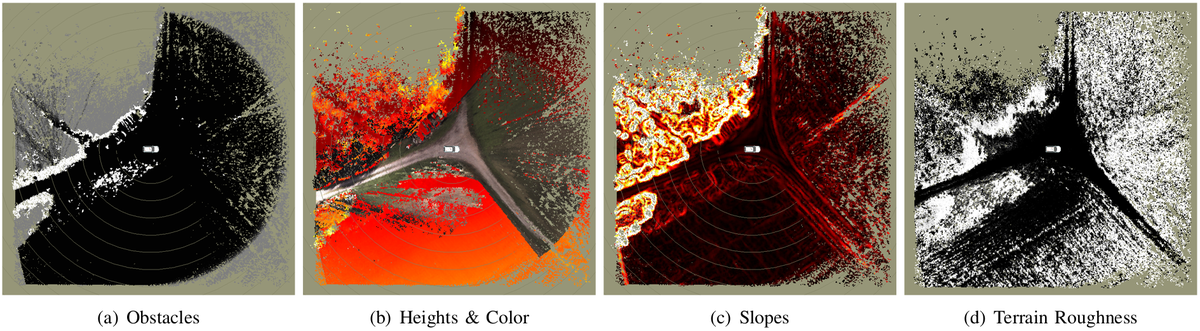
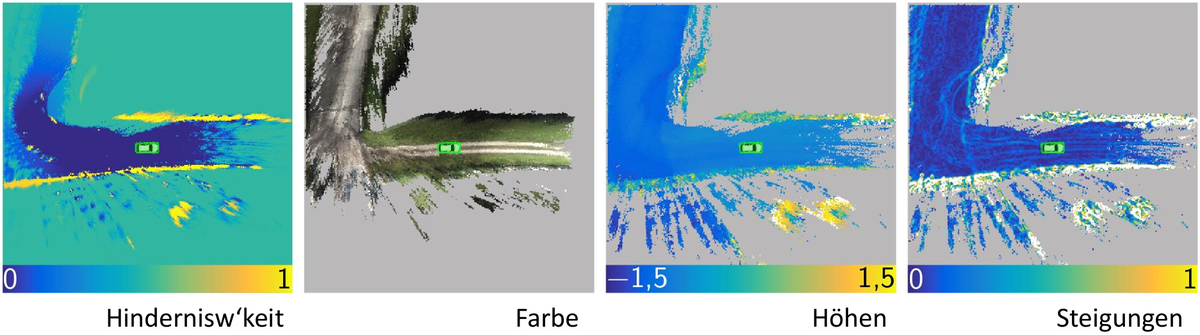
Für eine sichere autonome Navigation in unstrukturiertem Gelände ist ein detailliertes Modell der Umgebung unerlässlich. An unserem Institut werden Ansätze entwickelt, um durch Fusion verschiedener Sensoren ein solches Modell zu berechnen.
Dies beinhaltet neben Hinderniswahrscheinlichkeiten auch Höhen, Steigungen des Terrains, Farbinformationen und - abhängig von der verfügbaren Sensorik - Vegetationswahrscheinlichkeite, Nahinfrarotdaten und Temperaturdaten aus einer Wärmebildkamera.
Die Hindernisinformationen können dabei von einem oder mehreren LiDAR-Sensoren oder von Stereokamerasystemen aufgenommen werden.