Die Berechnung der Low-Level-Regelalgorithmen erfolgt auf einem Echtzeitsystem der Firma DSpace, das auch gleichzeitig die elektronische Ansteuerung der Fahrzeugaktorik übernimmt.
Die Low-Level-Regelung gliedert sich dabei, wie in der Kraftfahrzeugtechnik üblich, in die Längs- und Querregelung.
Low-Level Regelung
Regelarchitektur
Querregelung
Querregelung
Zur Einstellung eines gewünschten Lenkwinkels wird die Servolenkung verwendet, die über den CAN-Bus des Fahrzeuges angesteuert wird. Die Servolenkung bietet sowohl eine Winkel- als auch einen Momentenschnittstelle. Zur Zeit wird nur die Lenkwinkelschnittstelle verwendet, d.h. der gewünschte Lenkwinkel aus der High-Level-Regelung wird einfach über den CAN-Bus an die Servolenkung weitergeleitet, die selbstständig für die korrekte Einstellung des gewünschten Winkels sorgt.
In Zukunft soll für die Querregelung allerdings die Momentenschnittstelle der Servolenkung verwendet werden, mit der sich auch bei dynamischeren Lenkmaneuvern höhere Genauigkeiten realisieren lassen würden.
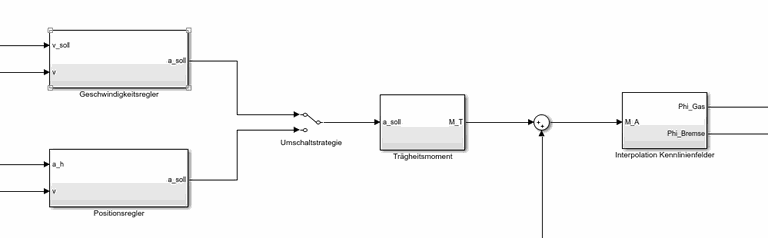
Längsregelung
Längsregelung
Im Normalfall kommandiert die High-Level-Regelung während einer autonomen Fahrt eine Wunschgeschwindigkeit, welche von der Low-Level-Regelung möglichst genau nachgeführt werden soll. Es treten aber auch Situationen auf, in denen es gewünscht ist an einem bestimmten Punkt möglichst genau zum Stehen zu kommen (z.B Halten an Kreuzungen oder Ampeln). Um diese beiden Modi bereitzustellen, ist die Längsregelung als schaltender Multiregler ausgeführt (siehe Abbildung). Eine spezielle Umschaltstrategie sorgt für den stoßfreien Übergang beim Wechseln des Reglers.