Das Projekt Verbesserung visuelle Erkennung ist in folgende drei Teilbereiche gegliedert:
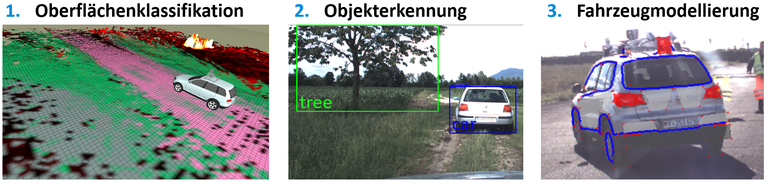
Im Bereich der Oberflächenklassifikation geht es um die Frage, auf welchem Bereich sich ein Roboter bewegen kann.
Hierzu wird das Transferlernen auf vortrainierten Neuronalen Netzen verwendet, um befahrbare Vegetation (Wiese) und nichtbefahrbare Vegetation (Baum, Busch) zu unterscheiden.
Eine Unterscheidung von Feldwegen und Wiesen kann nachfolgenden Schichten wie der Planungsebene bereitgestellt werden.
Nachfolgend werden die Eingangsdaten (Farbbild) und die annotierten Daten (ground truth) sowie die Ausgangsdaten (pixelgenaue semantische Segmentierung) dargestellt:



Die Objekterkennung beschäftigt sich mit der Frage welche Objekte in der Szene zu sehen sind. Mit Hilfe von Neuronalen Netzen werden Objekte detektiert und klassifiziert. Die klassifizierten Objekte werden dann zur Robustheitssteigerung getracked und als Landmarken bei der Eigenlokalisierung verwendet.
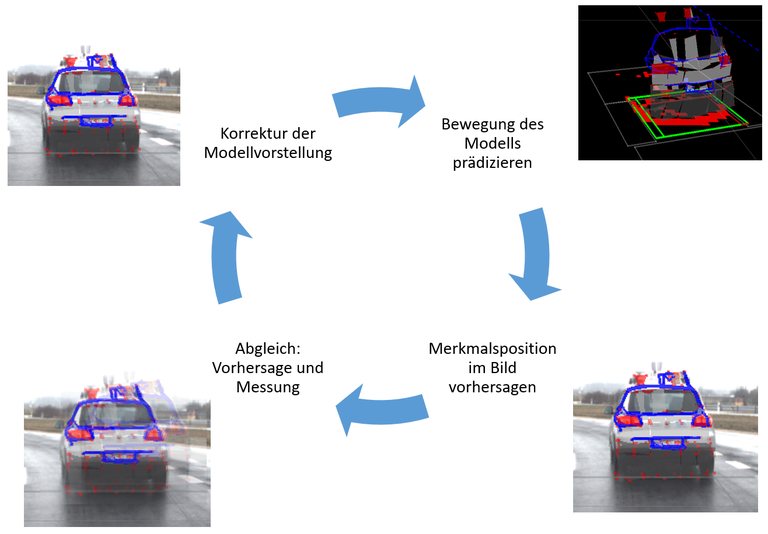
Die Fahrzeugmodellierung behandelt die automatische Generierung eines Merkmalsmodelles eines Fahrzeuges. Dieses Modell wird beim autonomen folgen eines Fahrzeuges im Konvoi verwendet. Hierzu werden die erlernten Merkmale im Kamerabild wiedererkannt und die genaue Position und Geschwindigkeit des zu verfolgenden Fahrzeuges ermittelt.