Das Projekt Verbesserung visuelle Erkennung ist in drei Teilbereiche gegliedert:

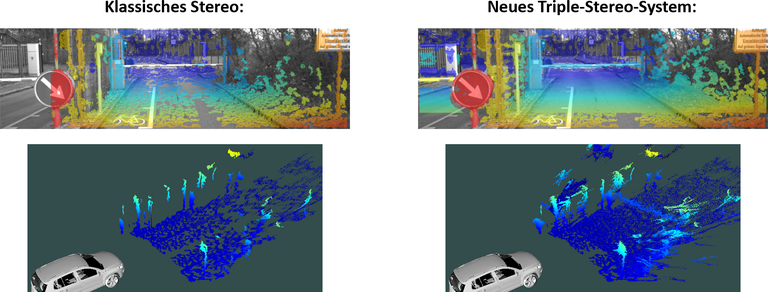
Es hat sich gezeigt, dass es mit Hilfe von klassischen Stereo-Kamera-Systemen, bestehend aus zwei horizontal versetzten Kameras, nicht möglich ist, horizontal ausgerichtete Strukturen zu erkennen. Entlang der Epipolarlinien werden keine gültigen Korrespondenzen gefunden.
Um dieses Problem zu lösen, wurden im Rahmen des Projekts weitere Kameras auf dem Versuchsträger MuCAR-4 (VW Tiguan) installiert. Das neue Stereo-System besteht aus drei Kameras, die sowohl zu einem horizontalen Paar, als auch zu einem vertikalen Paar kombiniert werden können:

Das horizontale Kamera-Paar hat eine Basisbreite von 80cm, welche eine sehr hohe Reichweite ermöglicht. Das vertikale Paar hat eine Basisbreit von 20cm und dient vor allem zur Erkennung von horizontal ausgerichteten Strukturen, wie beispielsweise Schranken.
Um das Triplet-Kamera-System effektiv zur Umgebungswahrnehmung nutzen zu können, wurden neue Stereo-Algorithmen entwickelt, die auf der Fusion aus horizontalem und vertikalem Bild-Paaren basieren.
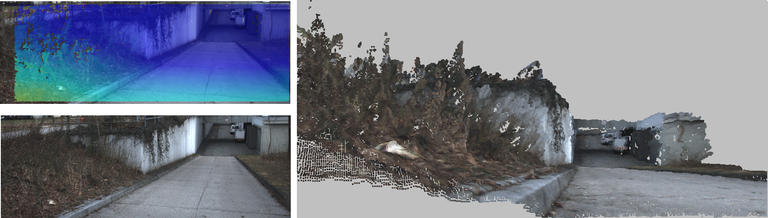
Verbesserte, moderne Stereo-Verfahren (Semi-Global Matching) in Verbindung mit hochauflösenden Kameras erlauben auch die Erkennung von sehr kleinen Hindernisstrukturen, wie Bordsteinen:
Der dritte Projektanteil beschäftigt sich mit der Fragestellung, wie die häufig relativ ungenauen und fehlerbehafteten Messungen aus den Stereo-Verfahren mit Hilfe von rekursiven Schätzalgorithmen verbessert werden können.
Dazu wurden zwei Ansätze verfolgt: Der Low-Level-Ansatz und der High-Level-Ansatz.
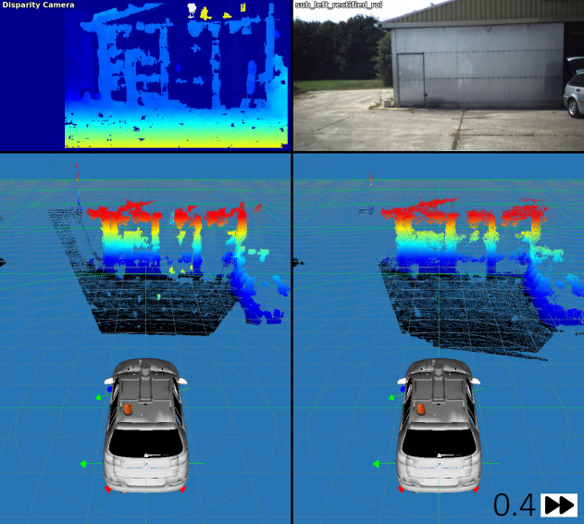
Beim Low-Level-Ansatz ist die Idee, die Umgebung mit Hilfe von Punktewolken zu modellieren. Die Position der Punkte sind Zustände von Kalman-Filtern und werden mit Hilfe der bekannten Eigenbewegung und den gemessenen Disparitätenbildern rekursiv geschätzt:
Damit konnten vor allem Falschmessungen deutlich reduziert werden:
Beim High-Level-Ansatz wird die Umgebung dagegen sehr abstrakt modelliert. Dabei wird unterschieden zwischen dem Terrain und diskreten Objekten. Objekte werden dargestellt als Flächen, Zylinder oder Punkte.
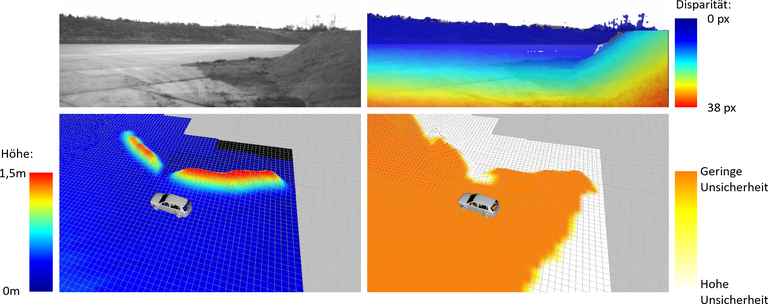
Die rekursive Schätzung des Terrains basiert auf rekursiven Gauss-Prozessen. Dies ermöglicht sowohl eine Aussage über die Höhe des Untergrunds an einer bestimmten Stelle, als auch über die Unsicherheit dieser Schätzung.
Bei der rekursiven Positionsbestimmung von Objekten haben zusätzliche monokulare Messungen als besonders hilfreich herrausgestellt. So konnte im Experiment die Position eines Objekts in einer Entfernung von ca. 200m auf wenige Meter genau bestimmt werden:
