Die ersten Ansätze elektronischer Navigationssysteme im Kfz wirken aus heutiger Sicht (2019) sehr archaisch. Sie wurden von der Seefahrt übernommen, wo die Angabe "Das Ziel liegt in einer Entfernung von xx Meilen in dieser Himmelsrichtung" durchaus hilfreich war.
Der fehlende Zugang zu den ab 1985 prinzipiell vorhandenen GPS Ortungsdaten, fehlende digitale Straßenkartendaten und die physikalische Größe von Speichermedien erlaubte damals in Kraftfahrzeugen nur eine Richtungs- und Wegstreckenbestimmung über einen elektronischen Kompass und Radumdrehungssensoren.
CITYPILOT
Im Jahr 1984 wurde ein einfacher Weg zur Zieleingabe und Navigationsanzeige eingeschlagen.
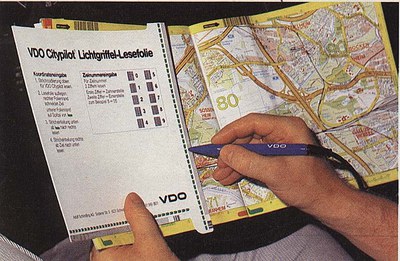
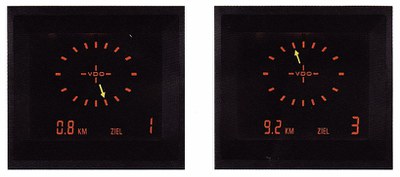
Nutzer des Systems, das zur Navigation in Städten vorgesehen war, gaben ihre Start- und Zielkoordinaten mit Hilfe einer speziell entwickelten Straßenkarte und eines Barcode-Lesers ein. Die Anzeige im Fahrzeuge zeigte fortlaufend die Luftlinienentfernung und Richtung zum Ziel an. Das System selbst kannte keine Straßen und war eigentlich nur in streng geometrisch aufgebauten Städten (Schachbrettstraßenanordnung, z.B. Mannheim) nützlich, versagte aber bei nicht direkter Straßenführung aufgrund von geographischen Hindernissen wie Flüsse oder Berghänge. Da es immer nur den Hinweis auf das Ziel in Himmelsrichtung anzeigte, gab es keinen Hinweis auf die dort selten vorhandenen Passagen und Abbiegemöglichkeiten.
Unsere eigenen Versuche mit diesen Systemen am Beispiel Stuttgart zeigten, dass eine Gruppe von Nutzerinnen und Nutzern mit dieser einfachen Navigationshilfe gut zu Recht kam. Andere versagten regelmäßig und blieben in Sackgassen stecken oder suchten Brücken über den Fluß in Nebenstraßen. Die letztgenannten machten den Fehler, auf jede kleine Bewegung des Richtungspfeils zu reagieren, während die Erfolgreicheren eher abwarteten bis der Richtungspfeil dauerhaft ein Abbiegen im rechten Winkel zur bisherigen Fahrtrichtung empfahl. Als Fazit zeigte sich, dass Personen mit einem guten räumlichen Vorstellungsvermögen und Orientierungssinn von dem System profitieren. Personen mit Orientierungsproblemen sind hingegen nicht hinreichend in der Lage, die Angabe der Luftlinienrichtung auf dem Display so auf das Straßennetz anzuwenden, dass sie einen wesentlichen Vorteil aus dieser technischen Lösung ziehen.
Travelpilot (Bosch/Blaupunkt)
1989 stellte Blaupunkt „das erste serienreife Navigationssystem für den Straßenverkehr in Europa“ vor.
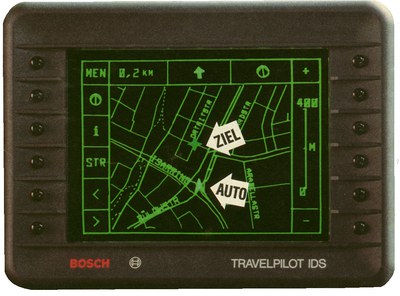
Es verarbeitet Daten eines elektronischen Kompasses und Raddrehimpulse zusammen mit gespeicherten Straßendaten. In einer monochromen Darstellung wird der Kartenausschnitt mit der momentanen Position des eigenen Fahrzeugs dargestellt. Der Kartenausschnitt rotiert in Abhängigkeit von der Fahrzeugposition im Erdmagnetfeld. Die angezeigte momentane Fahrtrichtung war immer oben. Da die damaligen Speichermöglichkeiten aufgrund der Baugröße von Festplattenspeichern sehr beschränkt waren, konten nur weige Kartendaten mobil mitgeführt werden.
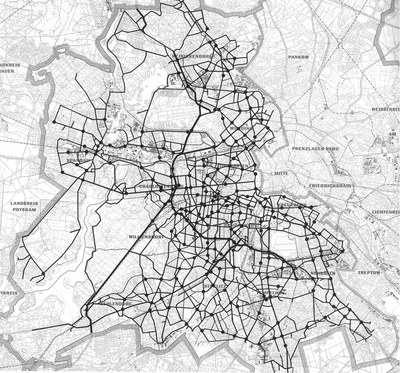
LISB (Leit- und Informationssystem Berlin)
Die gleiche Sensorik zur Anzeige der Luftlinienrichtung und –entfernung setzte auch das LISB in Berlin (West) ein. Zusätzlich wurde die Stadt in Quadrate von ca. 400m Seitenlänge eingeteilt. An den Grenzen diese Quadrate wurden Ampeln mit Infrarot-Sendern und Empfängern ausgerüstet, die alle mit einer Großrechenanlage kommunizierten. Eine Flotte von Versuchsfahrzeugen wurde ebenfalls mit solchen Sende-/Empfangseinrichtungen, einer optischen Anzeige, einer Sprachausgabe und einer Eingabetastatur ausgestattet.
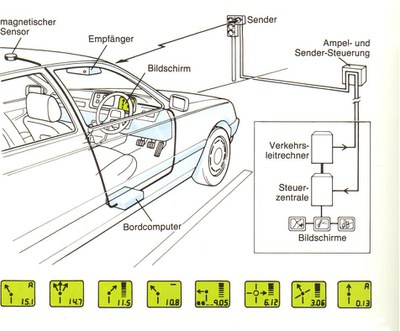
Die Versuchsfahrerinnen/Versuchsfahrer gaben beim Start ihren momentanen Standort und ihr Ziel in Klartext (Straße, Hausnummer) ein. Die Richtungsanweisungen erfolgten zunächst wie beim CITYPILOT (Himmelsrichtung und Luftlinienentfernung). Beim Passieren der ersten Sende-/Empfangsampel wurde die Start- und Zielinformationen an den Zentralrechner übermittelt. Dieser berechnete die optimale Route und spielte die Wegleitinformationen für das Quadrat, in welches das Fahrzeug eben einfuhr, zurück, wo sie entsprechend angezeigt wurden. Die optische Anzeige bestand aus dem Hinweis „dem momentanen Straßenverlauf folgen“ (siehe Bild oben, 2. Bild von links), oder einem Abbiegehinweis mit einem symbolischen Entfernungsbalken, der anzeigte, wann abgebogen werden sollte. Dabei wurden auch komplizierte Kreuzungen oder Kreisverkehrssituationen symbolisch abgebildet. Begleitet wurde die optische Anzeige durch eine entsprechende Sprachausgabe. Beim Einfahren in den nächsten Quadranten wurden wieder Daten ausgetauscht und die alten Daten im Fahrzeug durch neue überschrieben.
Versuche bei Fahrten von ca. 20 ortsunkundigen Versuchspersonen in Berlin, jeweils mit konventionellem Stadtplan und dem LISB zeigten: 17% der gesamten Fahrzeit wurde auf das Display des LISB geblickt, es zeichnete sich aber auch ein Übungseffekt ab, da diese Art des Navigierens mit LISB-Unterstützung den Versuchspersonen noch völlig neu war. Bei Fahrten mit Karte war Kartenstudium während des Fahrens nicht gestattet. Dabei waren die aufsummierten Zeiten des Kartenlesens im Stand beträchtlich, hinzu kamen häufigere Fahrfehler, was die gesamte Fahrtzeit bis zur Zielerreichung bei Kartennutzer*innen im Vergleich zur Benutzung des LISB erhöhte. Die Fahrzeit mit LISB waren sogar signifikant kürzer als beim Fahren mit Karte. Hier waren die Unterschiede insbesondere bei älteren Fahrerinnen und Fahrern stärker als bei Jüngeren.
Das System zeigte schon damals das Potential mobiler Navigationssysteme im Fahrzeug. Eine Umsetzung auf breiter Front musste aber an dem unverhältnismäßig hohen Aufwand für die Einrichtung und den Betrieb der notwendigen Infrastruktur scheitern.