Die Erkennung von Fahrerabsichten und die Berücksichtigung der Wünsche und Absichten der Nutzer stellt ein schwieriges, aber wichtiges Kriterium bei der nutzergerechten Auslegung von Systemen dar. Ausrufe wie „Was macht er denn jetzt schon wieder“, die wir von der Mensch-Computer-, der Mensch-Roboter- und der Mensch-Fahrzeuginteraktion kennen, sind ein Indiz dafür, dass sich die Systeme nicht so verhalten, wie es der Nutzer erwartet.
FAS Verhaltensprädiktion
Assistenzssteme zum Erkennen von Verhaltensabsichten Anderer
Nur wenn ein Fahrer an einer Kreuzung abbiegen will, ist es sinnvoll, ihn vor einem Radfahrer oder Fußgänger zu warnen, der sich parallel zu ihm bewegt und seine Fahrspur beim Abbiegen kreuzen würde. Eine Warnung vor jedem Radfahrer oder Fußgänger, der sich in der Nähe des Fahrzeugs aufhält, würde die Akzeptanz des Systems zerstören und zur Suche nach dem Ausschalter führen. Eine besondere Herausforderung stellt in dieser Situation die Prädiktion des Verhaltens von Fußgängern dar, da sie ihre Bewegungsrichtung und Geschwindigkeit sehr schnell ändern können.
Ziel der Entwicklung von Systemen zur Verhaltensprädiktion ist, möglichst mit „Standardsensorik“ auszukommen, eine hohe Trefferrate und wenige Fehlalarme zu gewährleisten sowie echtzeitfähig zu sein.


Verkehr nicht sichtbar Füße nicht sichtbar

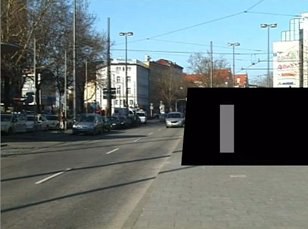
Köpfe nicht sichtbar nur Position sichtbar
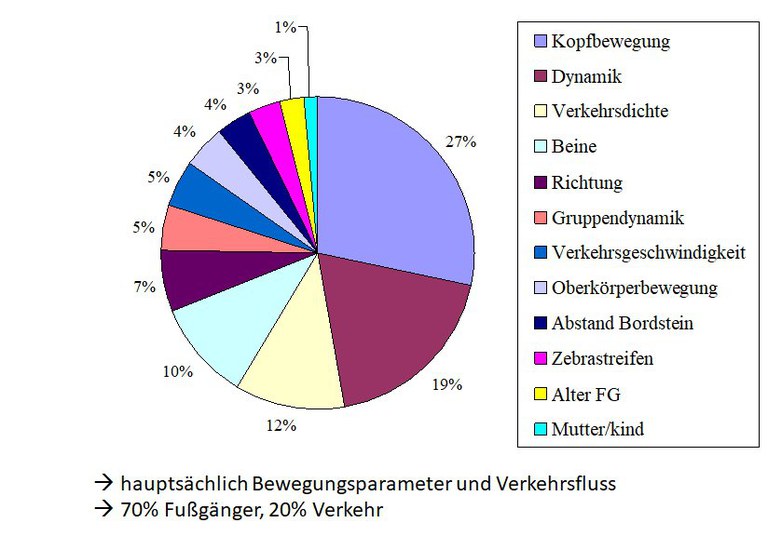
Ergebnisse:
Literatur:
Färber, Berthold: Kommunikationsprobleme zwischen autonomen Fahrzeugen und menschlichen Fahrern. In: Maurer, Markus; Gerdes, J. Christian; Lenz, Barbara; Winner, Hermann (Hrsg.): Autonomes Fahren – Technische, rechtliche und gesellschaftliche Aspekte. Springer Vieweg Berlin, 2015, S.127-146. (kostenlos abrufbar unter: https://link.springer.com/content/pdf/10.1007%2F978-3-662-45854-9_7.pdf)
Schmidt, Sabrina; Färber, Berthold: Pedestrians at the kerb – Recognising the action intentions of humans. In: Transportation Research, Part F, Traffic, Psychology and Behaviour, 12(4), pp. 300-310, July 2009. https://www.researchgate.net/publication/238300147