Fahrerassistenzsysteme zur Längsführung
Assistenten zur Unterstützung bei der Längsführung des Fahrzeugs umfassen:
- abstandsgeregelten Tempomat (ACC = Autonomous Cruise Control)
- Stauassistent (ACC Stop & Go)
- automatische Notbremse (ANB)
Die sichere und nutzergerechte Auslegung dieser Systeme, die jetzt in Serienfahrzeugen verfügbar sind, basiert auf einer Reihe von Versuchen und Anpassungen
Abstandsgeregelter Tempomat (ACC - Autonomes Cruise Control)
Die ersten Systeme, die auf den Markt kamen, waren primär für Autobahnen konzipiert, jedoch stellte sich schnell heraus, dass die Fahrerinnen und Fahrer das System auch im Stadtbereich und bei Geschwindigkeiten ab 30 km/h nutzen wollen.
Die nutzergerechte Gestaltung setzt zum einen voraus, dass sich die Systeme ähnlich wie ein menschlicher Fahrer verhalten sollen bzw. die Fahrenden zumindest verstehen müssen, warum sich das System genauso verhält.
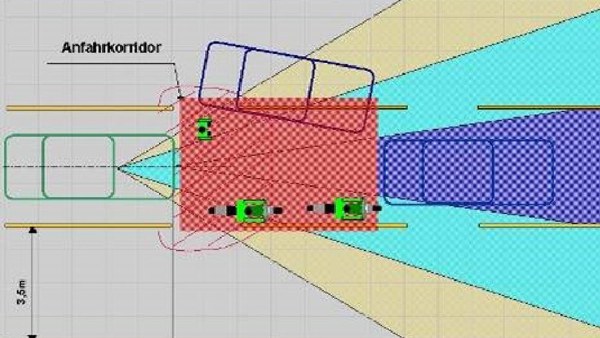
Beispiel: Überholen. Beim Überholen reduzieren Menschen den Abstand zum Vorausfahrenden und scheren dann aus. Damit wird der Überholweg möglichst kurz. Um zu verhindern, dass ein ACC-System bei der Annäherung an ein vorausfahrendes Fahrzeug, das überholt werden soll, abbremst muss das Ausschermanöver entweder vom Fahrer sehr früh eingeleitet werden, oder - besser - das System erkennt die Überholabsicht des Fahrers und bremst nicht zu früh ab.
Anhand von Versuchen konnten auf der Basis von Fahrzeugdaten Algorithmen zur Prädiktion der Überholabsicht und zur Verbesserung des Verhaltens von ACC entwickelt werden.
Literatur:
Blaschke, Christoph; Schmitt, Josef; Färber, Berthold: Überholmanöver-Prädiktion über CAN-Bus-Daten. In: ATZ, Automobiltechnische Zeitschrift, 11, 2008, 110. - S. 1022-1028.
Freyer, Jörn; Deml, Barbara; Maurer, Markus; Färber, Berthold: ACC with enhanced situation awareness to reduce behavior adaptions in lane change situations. In: Proceedings of the 2007 IEEE Intelligent Vehicles Symposium. Istanbul, Turkey. June 13-15, 2007.