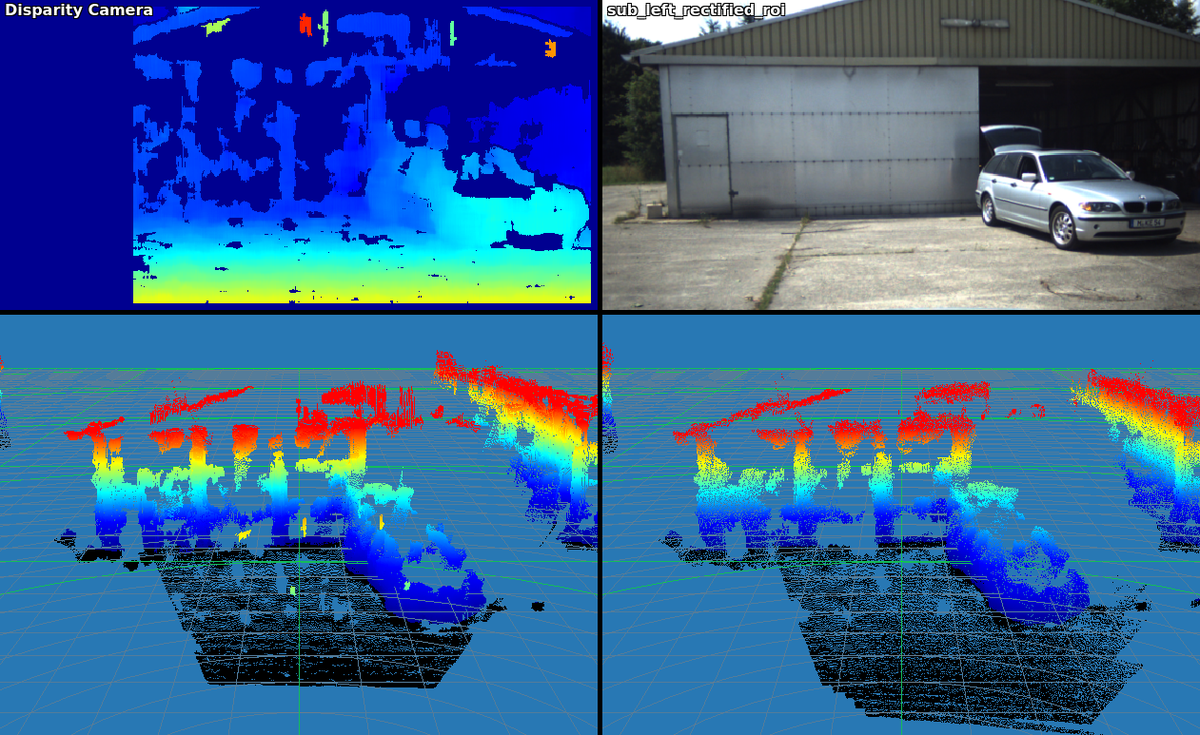
Another part of our research is stereo systems. For people themselves, the eyes are the most important sensor when driving a car.
Unlike radar or LiDAR, stereo systems are passive. They perceive the environment without having to send out signals themselves. They offer a very high resolution at comparatively low costs.
The main areas of research include:
- Optimum arrangement of stereo cameras with regard to position, orientation and optics
- Development and integration of stereo algorithms to reconstruct the environment
- Recursive estimation of the environment using motion stereo
- Investigation of suitable environmental models.
The focus is on the real-time capability and robustness of the algorithms developed. The generated environment estimate serves as a basis for the path planning of the car in further steps.