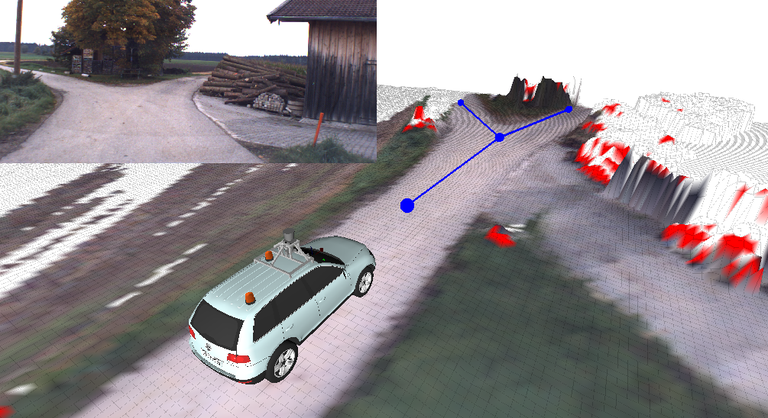
Road detection and tracking plays a decisive role in the field of autonomous driving. In normal road traffic, there are usually clear road markings or other indications that simplify tracking. At our institute, on the other hand, mostly unstructured country lanes are tracked. In addition, the junctions are recognized and entered in a map. The basis for the tracking is the local environment map developed at the institute, which merges sensor data from LiDAR and camera. In this map the road is tracked with the help of a particle filter.