A detailed model of the environment is essential for safe autonomous navigation in unstructured terrain. At our institute approaches are developed to calculate such a model by fusion of different sensors.
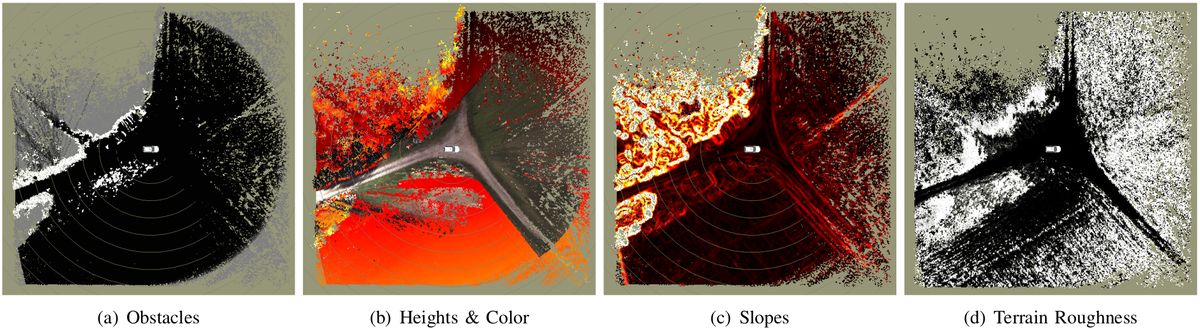
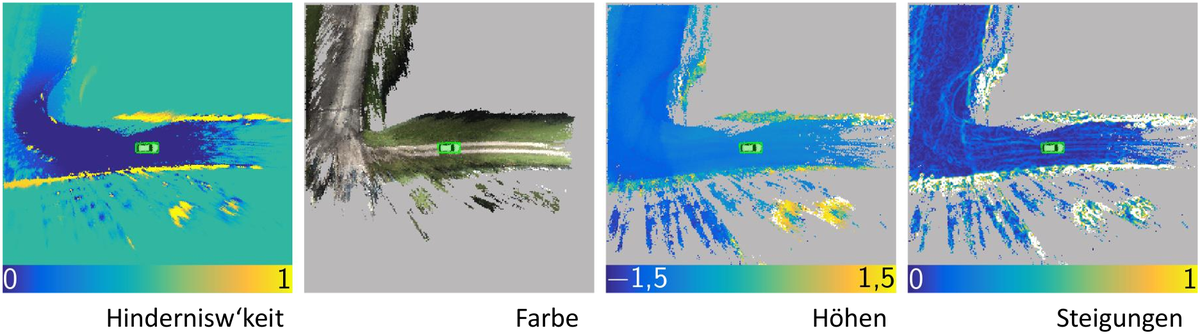
In addition to obstacle probabilities, this also includes heights, slopes of the terrain, colour information and - depending on the available sensors - vegetation probabilities, near-infrared data and temperature data from a thermal imaging camera.
The obstacle information can be recorded by one or more LiDAR sensors or stereo camera systems.