The low-level driving control algorithms are computed on a real-time control system from the DSpace company, which also takes over the electronic control of the vehicle actuators.
As it is common in automotive technology, our low-level control is divided into longitudinal and lateral control.
Low-Level Control
Control Architecture
Lateral Control
Lateral Control
The power steering, which is controlled via the vehicle's CAN bus, is used to set the desired steering angle. The power steering provides both an angle and a torque interface. At present, only the steering angle interface is used, i.e. the desired steering angle from the high-level control is simply forwarded via the CAN bus to the power steering, which automatically ensures the correct setting of the desired angle.
In the future, however, the torque interface of the power steering will be used for lateral control, which will allow higher accuracy to be achieved even with more dynamic steering maneuvers.
Longitudinal Control
Longitudinal Control
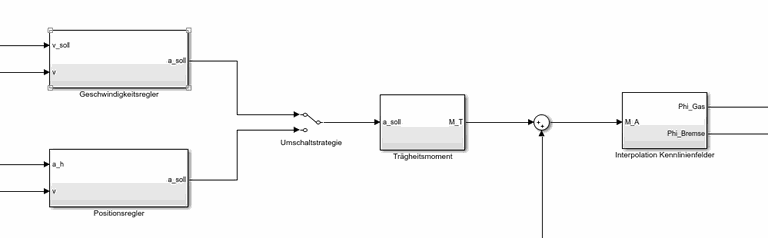
Usually, when the vehicle is driving autonomously, the high-level control commands a desired speed to the low-level control unit, which should be tracked as precisely as possible by the low-level controller. However, there are also situations in which it is desired to stop as precisely as possible at a certain point (e.g. stopping at crossroads or traffic lights). To provide these two modes, the longitudinal control is designed as a switching multi-controller (see figure). A special switching strategy ensures a smooth transition when changing the controller.