Trajectorizer
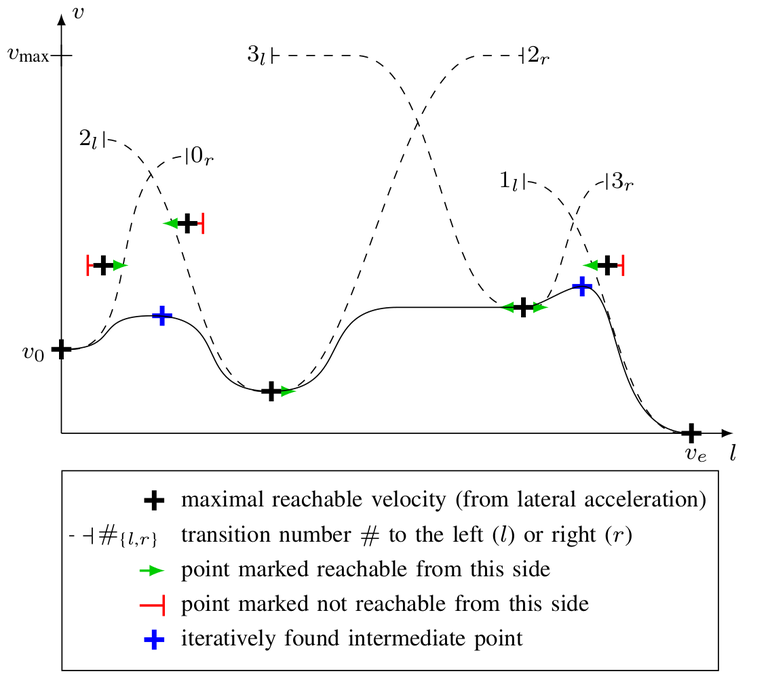
Here, paths are either converted to trajectories or given trajectories are refined. Example of a speed Profile calculation:
First, the maximum speeds, given a maximum lateral acceleration, are calculated for all path points (black crosses). Then, smooth speed transitions between pairs of points are searched for (dashed lines). In a first step, the initial speed and in the following steps, always the lowest unchecked speeds are expanded. In the above example, the first point is marked as inaccessible (red markers), the second as accessible (green markers). Unreachable points are excluded from the further search. In case of overlapping possible profiles, intermediate points (blue) are generated. Finally, a smooth speed profile is generated (continuous line).