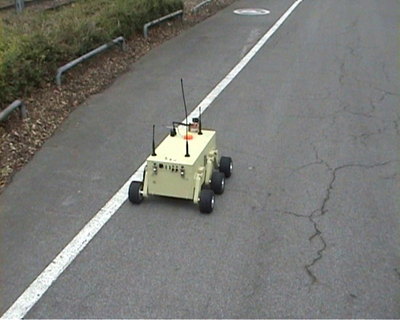
Teilautonomie für mobile Kleinroboter
In Kooperation mit der Firma Rheinmetall Defence Electronics
 Ziele der Kooperation:
Ziele der Kooperation:
- Modifizierung der „Wegerkennungssoftware“ und Portierung auf den Kleinroboter
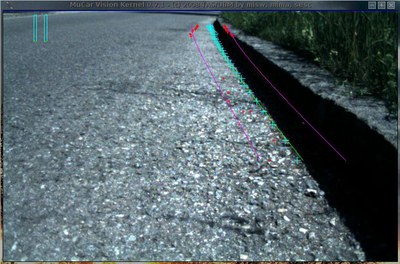
- Erkennung von gut strukturierten Wegkanten für einen teilautonomen Fahrbetrieb
- Berechung von Ablage zur Fahrbahn und Gierwinkel zur Fahrbahn
Die Hauptarbeitspakete bis November 2008 beinhalten eine Konzeptstudie, die problemspezifischen Randbedingung berücksichtigt: Die Kamera ist nur 25-30 cm über dem Boden (nur eine Wegkante sichtbar); hohe Nickwinkelstörungen treten beim ungefederten Kleinroboter auf (keine inertiale Stabilisierung der Kamera) und eine geringe Baugröße sowie Energie, die nur einen Klein-PC erlauben. Nach Fertigstellung der Konzeptstudie wird ein probabilistischer Mechanismus zur Selbstüberwachung der Schätzleistung (Übergabe der Kontrolle an den menschl. Operator bei Instabilität) entwickelt. Sorgfältig ausgewählte, miniaturisierte Hardware für die Hauptkomponenten des Systems (Kamera, IMU, computer) stellt die Grundlage für die finale Integration der Hard- und Software in das Gesamtsystem des mobilen Kleinaufklärungsroboters.
 Szenarien:
Szenarien:
- Folgen weißer Begrenzungslinien
- Verfolgen von Randsteinen
- Verfolgen von Graskanten