Longitudinal Control
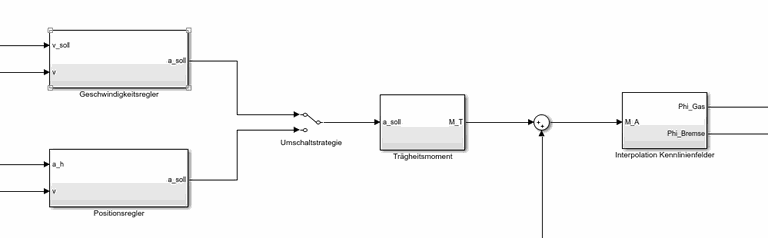
Usually, when the vehicle is driving autonomously, the high-level control commands a desired speed to the low-level control unit, which should be tracked as precisely as possible by the low-level controller. However, there are also situations in which it is desired to stop as precisely as possible at a certain point (e.g. stopping at crossroads or traffic lights). To provide these two modes, the longitudinal control is designed as a switching multi-controller (see figure). A special switching strategy ensures a smooth transition when changing the controller.