Localizer
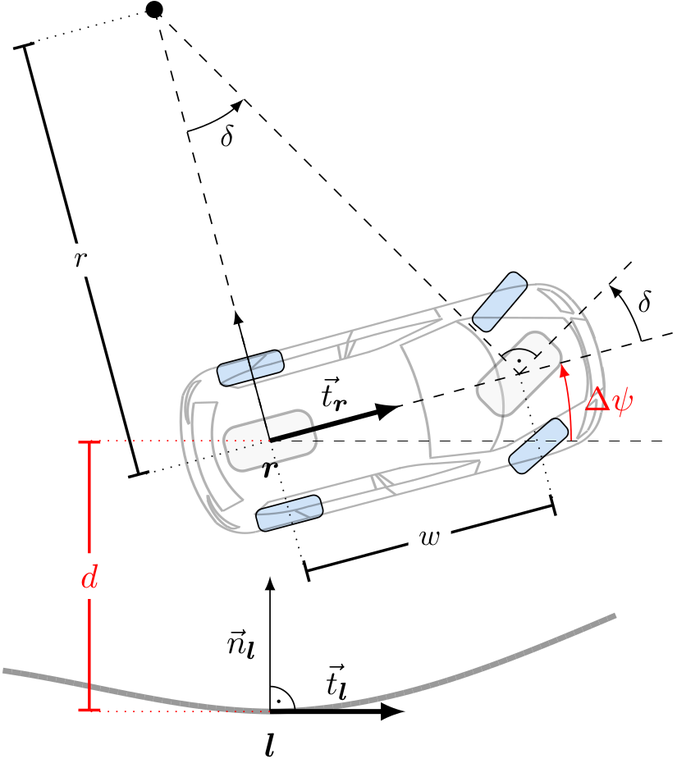
Here, the vehicle is localized on a given trajectory. Example of localization l of the rear-axle center r:
For each new egomotion estimate, the nearest point on the planned trajectory is searched for. This localization and the relative pose of the vehicle reference point are the current control errors.
Analogous to the current localization, predicted localizations are generated using past control outputs.
These predicitons are used to compensate dead times in longitudinal and lateral control.