Cognitive Automated Sensor Integrated Unmanned Mission System
UAV Guidance and Management from the Cockpit
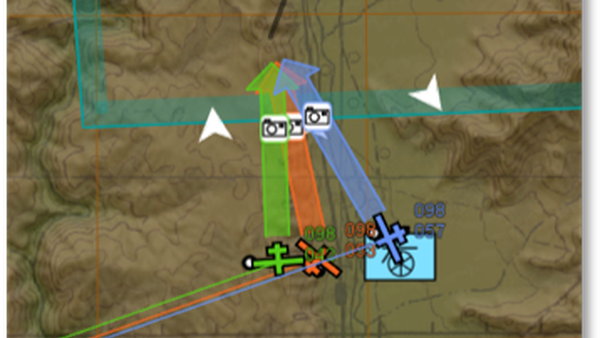
Future helicopter technologies are studied in the CASIMUS project. The research focus lies on the cooperation of manned and unmanned aircraft (drones/UAVs) in so-called Manned-Unmanned-Teaming (MUM-T) configurations. Such cooperation approaches are developed at the Institute of Flight Systems and tested together with Bundeswehr pilots in the own helicopter mission simulator. Subcapabilities are tested on UAV demonstrators in real flight.
This project contributes to the following research areas of the institute: