Integrierte Toolchain: Sicherheitskritische Softwareentwicklung und Flugleistungsvalidierung
Motivation mit Zielsetzung
Ziel des Projekts ELAPSED ist die Entwicklung eines neuartigen (hybrid)elektrischen Flugzeugantriebs. Im Zuge der Elektrifizierung und Digitalisierung in der Luftfahrt, werden Flugzeuge zunehmend mit elektrischen Antrieben und einhergehend neuen Designs bzw. Konzepten entwickelt. Um eine sichere und standardkonforme Entwicklung und Nutzung dieser neuartigen Antriebe sicherzustellen, werden Definitionen und Tools für Prozesse beispielsweise zur Softwarentwicklung benötigt. Diese Prozesschritte müssen anschließend auf Luftfahrzeuge anwendbar sein. Um im frühen Entwicklungsstadium dieser (hybrid)elektrisch betriebenen Flugzeuge eine zertifizerungskonforme und effiziente Entwicklung zu gewährleisten, sind Tools und Toolchains, also Prozesse und Prozessketten notwendig, die Anforderungsmanagement, Systemsimulation und Validierung vereinen.
Stand von Wissenschaft und Technik mit Neuheit des Lösungsansatzes
Bisherige Flug- und Missionsleistungsbetrachtungen basieren vorrangig auf vereinfachten Annahmen und Handmethoden. Viele dieser Methoden beruhen auf konventionellen verbrennungsmotorisch angetriebenen Flugzeugkonzepten. Der neue Lösungsansatz beruht auf einem detaillierten Simulationsmodell, welches für stationäre als auch dynamische Leistungsuntersuchungen genutzt wird. Die schematische Architektur dieser Gesamtsystemsimulation ist in Abbildung 1 dargestellt. Dabei wird neben der Qualität der Ergebnisse der Fokus auf Effizienz und Automatisierung gelegt. So wird auch eine bisher nicht vorhandene, automatisierte Toolchain zur standardkonformen parallelen Entwicklung des Systems vorrangig für die frühe Entwicklungsphase zur Bewertung von neuartigen Flugzeugkonzepten implementiert. Eine solche, automatisierte Prozesskette ist bisher nicht zu finden. In dieser frühen Phase sind viele Komponenten wie Batterie und Motor parallel in der Entwicklung. Änderungen der einzelnen Komponenten, welche minimale bis gravierende Auswirkungen auf das Gesamtkonzept darstellen, sollen daher mithilfe eines standardkonformen Prozesses überwacht werden. Die Komponenten können über das Gesamtsystem in u.a. Pilot-in-the-Loop Simulationen validiert werden. Ebenso können dadurch Anforderungen des Gesamtsystems an die Komponenten abgeleitet und mittels der Toolchain zur Softwareentwicklung in Abbildung 2 abgeprüft werden.
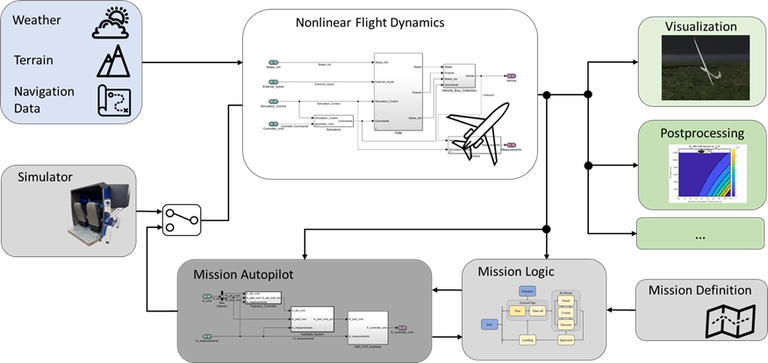
Abbildung 1: Architektur der Gesamtsystemsimulation
Bisher wird Software und deren Test vorrangig manuell gehandhabt. Hierbei werden unter anderem Code händisch geschrieben und Tests manuell bewertet. Es gibt zumeist keine automatisierte Rückverfolgbarkeit zwischen Anforderungen, der Software und den ausgeführten Tests. Im Zuge dieses Projekts ELAPSED wird eine prozessorientierte Toolchain zur Softwareentwicklung eingerichtet und verwendet, um die Anforderungen zu verwalten, Software für die Batterieansteuerung (Batterie-Controller) zu entwickeln und die Software mit Echtzeitcomputern zu testen. Die Toolchain in Abbildung 2 gewährleistet eine bidirektionale Rückverfolgbarkeit zwischen den Anforderungen und den Testergebnissen, wie es von den Softwarestandards gefordert wird. Agile Methoden wie kontinuierliche Integration und Quellcodeverwaltung werden ebenfalls implementiert, um die Entwicklung flexibel zu gestalten. Eine modulare Hardware-in-the-Loop-Testumgebung (HIL) wird aufgebaut und beispielsweise zur Verifizierung der Software von Batterie- und Motor-Controller verwendet. Welche Tools und wie diese für die zertifizerungskonforme Entwicklung von Luftfahrtkomponenten und Luftfahrzeugen einzusetzen sind, ist nicht öffentlich bekannt und durch die Industrie unter Geheimhaltung.
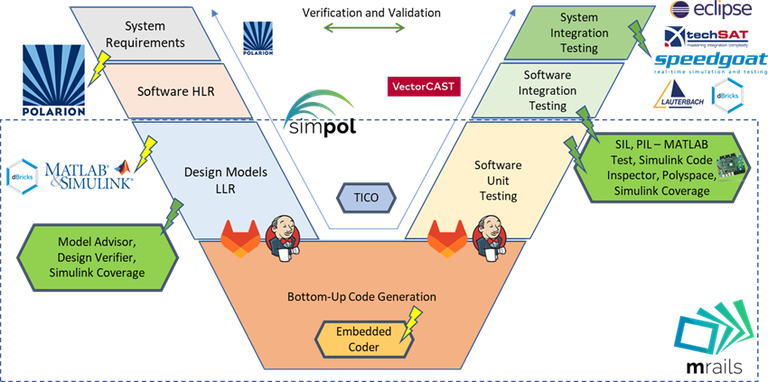
Abbildung 2: V-Modell der Softwareentwicklung inkl. Tools und Traceability (= Rückverfolgbarkeit der Anforderungen)
Ergebnisse
Bisher wurden das Simulationsmodell inklusive der automatisierten Toolchain zur Anforderungsvalidierung für einen elektrischen Motorgleiter implementiert. Dabei können automatisiert parallel stationäre und dynamische Flug- und Missionsleistungsuntersuchungen ausgeführt werden und die Ergebnisse über bidirektionale Verknüpfung automatisch mit den Anforderungen validiert werden. Bis zum Ende der aktuellen Förderperiode ist die Umsetzung der Integration einer im Projekt ELAPSED entwickelten Multilevel-Batterie in ein fliegendes System (z.B. Multicopter) geplant. Die prozessorientierte Toolchain der Softwareentwicklung inkl. kontinuierlicher Integration und Versionskontrolle ist implementiert und befindet sich in Anwendung, beispielsweise für die Batterieansteuerung (Batterie-Controller). Ein Hardware-in-the-Loop (HIL) Prüfstands wird derzeit aufgebaut, welcher für den Batterie-Controller bereits läuft und erste Ergebnisse liefert.
Bis Ende 2024 ist die Erweiterung des bisherigen Aufbaus um den Batterie und Motorstrang forciert. Dabei soll beispielsweise der Motor-Controller integriert werden und mittels Echtzeit-Kopplung mit einem Flugsimulator inklusive Flugdynamik für die Pilot-in-the-Loop Simulation realistisch getestet werden können. Dazu soll ein Iron Bird für HIL-Simulationen aufgebaut werden, bei dem die Komponenten in Echtzeit mittels Flugsimulator betrieben und ihre (Leistungs-)Parameter ausgewertet werden können. Darüber hinaus soll der Prozess auf eine unbemannte Drohne integriert werden, welche die Fähigkeit besitzt senkrecht zu starten und zu landen. Das Fluggerät namens PEGASUS wird als Aufklärungsdrohne mit einem neuen elektrischen Antriebskonzept mittels Impeller betrieben, welches eine höhere Fluggeschwindigkeit im Vergleich zu bereits verfügbaren Systemen erzielt und somit schneller im Einsatzgebiet mit der Aufklärung beginnen kann. PEGASUS soll als ca. 13 kg schwerer Demonstrator mit einer zusätzlichen Nutzlast von 2 kg gebaut werden. Dadurch soll das Verfahren mit einem zweiten sich unterscheidenden Flugmuster validiert werden.
Verwertungsperspektive
Die im Rahmen des Projekts gewonnen Ergebnisse sind bereits jetzt schon sowohl für zivile als auch militärische Applikationen anwendbar. Dabei sind diese nicht auf das im Projekt maßgeblich betrachtete, (hybrid-)elektrische Luftfahrzeug beschränkt.
Die Toolkette zur standardkonformen Entwicklung sicherheitskritischer Softwarekomponenten für die Luftfahrt kann Dienststellen der Bundeswehr , wie dem Luftfahrtamt der Bundeswehr (LufABw) oder auch der Wehrtechnischen Dienststelle für Luftfahrzeuge und Luftfahrtgeräte der Bundeswehr (WTD 61) zur Verfügung gestellt werden, um eine Bewertung und Beurteilung der Entwicklungsprozesse von Systemherstellern zu ermöglichen. Darüberhinaus kann das BAAinBw diese neuen Marktteilnehmern zur Verfügung stellen, um dadurch die Vielfalt möglicher Systemhersteller zu erhöhen.
Analoge Verwertungsmöglichkeiten ergeben sich für die Simulationsumgebung zur Ermittlung, Bewertung und Validierung der Missionsleistungen von Luftfahrzeugen. Die im Rahmen des Projekts entwickelte Toolkette ermöglicht es, neu zu beschaffende Systeme von der unbemannten Kleinstdrohne bis hin zu großen Transportflugzeugen bereits in der initialen Entwurfsphase hinsichtlich der Erfüllung geforderter Missionsanforderungen zu bewerten. Durch diese Toolkette werden bundeswehrintern Fähigkeiten geschaffen, die sonst bei externen Anbietern (wie z. B. IABG mbH, DLR, Fraunhofer oder ESG) beschafft werden müssen.
Die im Rahmen des Projekts noch in der Entstehung befindlichen, unbemannten Luftfahrzeuge stellen einen Use Case für die Anwendung der entstandenen Toolketten dar und erlauben es, weitere Erfahrungen über die reine Simulation hinaus zu sammeln.
Ansprechpartner und am Projekt beteiligte Mitarbeiter